- Page 1: Linköping Studies in Science and T
- Page 5: Acknowledgements This work would ha
- Page 9 and 10: Contents 1 Introduction 1 2 Overvie
- Page 11 and 12: Chapter 1 Introduction An Unmanned
- Page 13 and 14: of the environment in order to avoi
- Page 15 and 16: Chapter 2 Overview This chapter pre
- Page 17: 2.1. UAV SOFTWARE ARCHITECTURE 7 wh
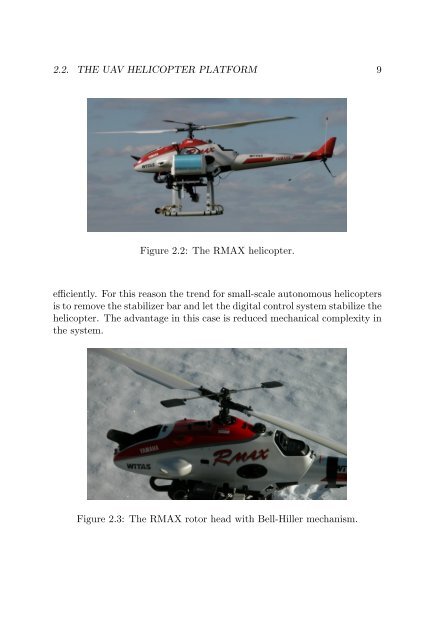
- Page 21 and 22: 2.2. THE UAV HELICOPTER PLATFORM 11
- Page 23 and 24: Chapter 3 Simulation 3.1 Introducti
- Page 25 and 26: 3.2. HARDWARE-IN-THE-LOOP SIMULATIO
- Page 27 and 28: 3.3. REFERENCE FRAMES 17 3.3 Refere
- Page 29 and 30: 3.4. THE AUGMENTED RMAX DYNAMIC MOD
- Page 31 and 32: 3.4. THE AUGMENTED RMAX DYNAMIC MOD
- Page 33 and 34: 3.5. SIMULATION RESULTS 23 3.5 Simu
- Page 35 and 36: 3.5. SIMULATION RESULTS 25 Figure 3
- Page 37 and 38: 3.5. SIMULATION RESULTS 27 Figure 3
- Page 39 and 40: Chapter 4 Path Following Control Mo
- Page 41 and 42: 4.2. TRAJECTORY GENERATOR 31 Figure
- Page 43 and 44: 4.2. TRAJECTORY GENERATOR 33 Fig. 4
- Page 45 and 46: 4.2. TRAJECTORY GENERATOR 35 be use
- Page 47 and 48: 4.2. TRAJECTORY GENERATOR 37 4.2.3
- Page 49 and 50: 4.2. TRAJECTORY GENERATOR 39 radius
- Page 51 and 52: 4.2. TRAJECTORY GENERATOR 41 Calcul
- Page 53 and 54: 4.2. TRAJECTORY GENERATOR 43 Figure
- Page 55 and 56: 4.2. TRAJECTORY GENERATOR 45 by the
- Page 57 and 58: 4.2. TRAJECTORY GENERATOR 47 Figure
- Page 59 and 60: 4.3. OUTER LOOP CONTROL EQUATIONS 4
- Page 61 and 62: 4.4. EXPERIMENTAL RESULTS 51 Up [m]
- Page 63 and 64: 4.5. CONCLUSIONS 53 1 + s 1 C(s) =
- Page 65 and 66: 4.5. CONCLUSIONS 55 Vel [m/s] 20 18
- Page 67 and 68: Chapter 5 Sensor fusion for vision
- Page 69 and 70:
composed of three accelerometers an
- Page 71 and 72:
5.1. FILTER ARCHITECTURE 61 filter
- Page 73 and 74:
5.1. FILTER ARCHITECTURE 63 north,
- Page 75 and 76:
5.2. EXPERIMENTAL RESULTS 65 Figure
- Page 77 and 78:
5.2. EXPERIMENTAL RESULTS 67 Figure
- Page 79 and 80:
5.2. EXPERIMENTAL RESULTS 69 by the
- Page 81 and 82:
5.3. CONCLUSION 71 vision system st
- Page 83 and 84:
BIBLIOGRAPHY 73 [9] E. Frazzoli. Ro
- Page 85 and 86:
Appendix A 75
- Page 87 and 88:
A.1. PAPER I 77 is a three-dimensio
- Page 89 and 90:
A.1. PAPER I 79 The reference point
- Page 91 and 92:
A.1. PAPER I 81 Path Av Err Max Err
- Page 93 and 94:
A.2. PAPER II 83 From Motion Planni
- Page 95 and 96:
A.2. PAPER II 85 From Motion Planni
- Page 97 and 98:
A.2. PAPER II 87 From Motion Planni
- Page 99 and 100:
A.2. PAPER II 89 From Motion Planni
- Page 101 and 102:
A.2. PAPER II 91 From Motion Planni
- Page 103 and 104:
A.2. PAPER II 93 From Motion Planni
- Page 105 and 106:
A.2. PAPER II 95 From Motion Planni
- Page 107 and 108:
A.3. PAPER III 97 A.3 Paper III Aut
- Page 109 and 110:
A.3. PAPER III 99 the projection of
- Page 111 and 112:
A.3. PAPER III 101 yes Tbo > Tlim2
- Page 113 and 114:
A.3. PAPER III 103 immediately afte
- Page 115 and 116:
A.3. PAPER III 105 altitude [m] 20
- Page 117:
A.3. PAPER III 107 Fig. 10. Flight
- Page 121 and 122:
Department of Computer and Informat
- Page 123 and 124:
No 598 Rego Granlund: C 3 Fire - A
- Page 125 and 126:
No 1024 Aleksandra Tešanovic: Towa