

Navigation Functionalities for an Autonomous UAV Helicopter
Navigation Functionalities for an Autonomous UAV Helicopter
Navigation Functionalities for an Autonomous UAV Helicopter

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
5.2. EXPERIMENTAL RESULTS 69<br />
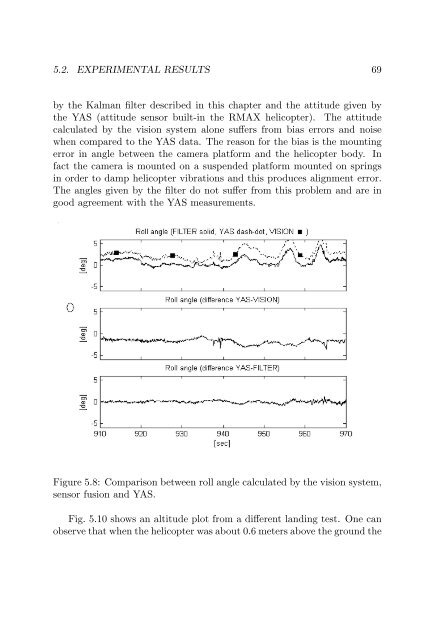
by the Kalm<strong>an</strong> filter described in this chapter <strong>an</strong>d the attitude given by<br />
the YAS (attitude sensor built-in the RMAX helicopter). The attitude<br />
calculated by the vision system alone suffers from bias errors <strong>an</strong>d noise<br />
when compared to the YAS data. The reason <strong>for</strong> the bias is the mounting<br />
error in <strong>an</strong>gle between the camera plat<strong>for</strong>m <strong>an</strong>d the helicopter body. In<br />
fact the camera is mounted on a suspended plat<strong>for</strong>m mounted on springs<br />
in order to damp helicopter vibrations <strong>an</strong>d this produces alignment error.<br />
The <strong>an</strong>gles given by the filter do not suffer from this problem <strong>an</strong>d are in<br />
good agreement with the YAS measurements.<br />
Figure 5.8: Comparison between roll <strong>an</strong>gle calculated by the vision system,<br />
sensor fusion <strong>an</strong>d YAS.<br />
Fig. 5.10 shows <strong>an</strong> altitude plot from a different l<strong>an</strong>ding test. One c<strong>an</strong><br />
observe that when the helicopter was about 0.6 meters above the ground the














