
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
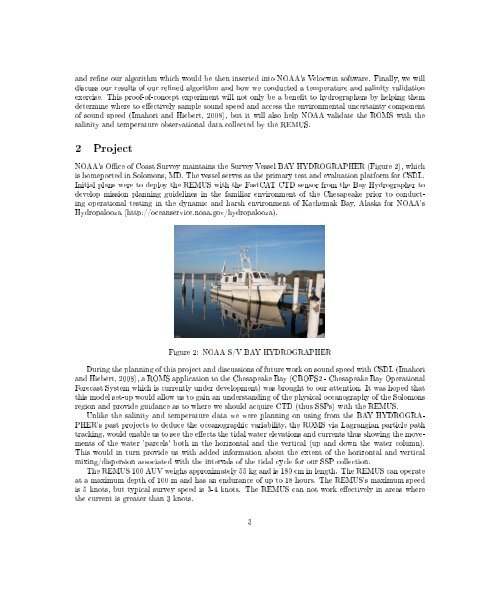
and rene our algorithm which would be then inserted into NOAA's Velocwin software. Finally, we willdiscuss our results of our rened algorithm and how we conducted a temperature and salinity validationexercise. This proof-of-concept experiment will not only be a benet to hydrographers by helping themdetermine where to eectively sample sound speed and access the environmental uncertainty componentof sound speed (Imahori and Hiebert, 2008), but it will also help NOAA validate the ROMS with thesalinity and temperature observational data collected by the REMUS.2 ProjectNOAA's Oce of Coast Survey maintains the Survey Vessel BAY HYDROGRAPHER (Figure 2), whichis homeported in Solomons, MD. The vessel serves as the primary test and evaluation platform for CSDL.Initial plans were to deploy the REMUS with the FastCAT CTD sensor from the Bay Hydrographer todevelop mission planning guidelines in the familiar environment of the Chesapeake prior to conductingoperational testing in the dynamic and harsh environment of Kachemak Bay, Alaska for NOAA'sHydropalooza (http://oceanservice.noaa.gov/hydropalooza).Figure 2: NOAA S/V BAY HYDROGRAPHERDuring the planning of this project and discussions of future work on sound speed with CSDL (Imahoriand Hiebert, 2008), a ROMS application to the Chesapeake Bay (CBOFS2 - Chesapeake Bay OperationalForecast System which is currently under development) was brought to our attention. It was hoped thatthis model set-up would allow us to gain an understanding of the physical oceanography of the Solomonsregion and provide guidance as to where we should acquire CTD (thus SSPs) with the REMUS.Unlike the salinity and temperature data we were planning on using from the BAY HYDROGRA-PHER's past projects to deduce the oceanographic variability, the ROMS via Lagrangian particle pathtracking, would enable us to see the eects the tidal water elevations and currents thus showing the movementsof the water 'parcels' both in the horizontal and the vertical (up and down the water column).This would in turn provide us with added information about the extent of the horizontal and verticalmixing/dispersion associated with the intervals of the tidal cycle for our SSP collection.The REMUS 100 AUV weighs approximately 55 kg and is 180 cm in length. The REMUS can operateat a maximum depth of 100 m and has an endurance of up to 18 hours. The REMUS's maximum speedis 5 knots, but typical survey speed is 3-4 knots. The REMUS can not work eectively in areas wherethe current is greater than 3 knots.3