Handyboard and Kit Manual (A.K.A. - Botball Programming Guide)
Handyboard and Kit Manual (A.K.A. - Botball Programming Guide)
Handyboard and Kit Manual (A.K.A. - Botball Programming Guide)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
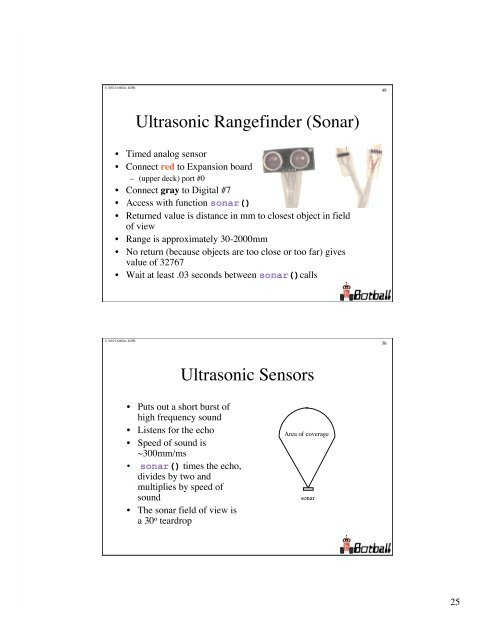
© 2002 D.Miller, KIPR49Ultrasonic Rangefinder (Sonar)• Timed analog sensor• Connect red to Expansion board– (upper deck) port #0• Connect gray to Digital #7• Access with function sonar()• Returned value is distance in mm to closest object in fieldof view• Range is approximately 30-2000mm• No return (because objects are too close or too far) givesvalue of 32767• Wait at least .03 seconds between sonar()calls© 2002 D.Miller, KIPR50Ultrasonic Sensors• Puts out a short burst ofhigh frequency sound• Listens for the echo• Speed of sound is~300mm/ms• sonar() times the echo,divides by two <strong>and</strong>multiplies by speed ofsound• The sonar field of view isa 30 o teardropArea of coveragesonar25