micromouse maze solving robot chang yuen chung universiti ...
micromouse maze solving robot chang yuen chung universiti ...
micromouse maze solving robot chang yuen chung universiti ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
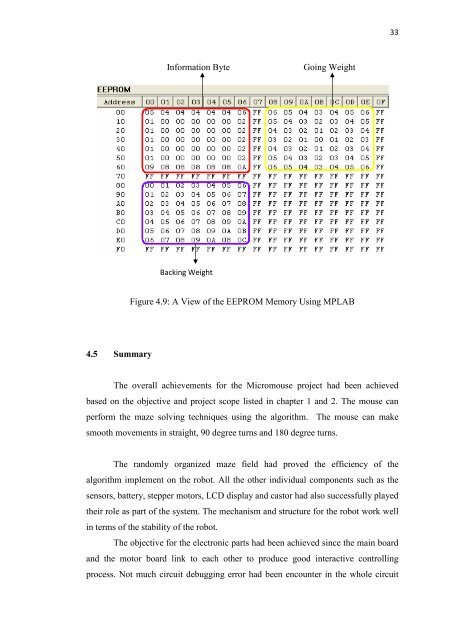
33Information ByteGoing WeightBacking WeightFigure 4.9: A View of the EEPROM Memory Using MPLAB4.5 SummaryThe overall achievements for the Micromouse project had been achievedbased on the objective and project scope listed in chapter 1 and 2. The mouse canperform the <strong>maze</strong> <strong>solving</strong> techniques using the algorithm. The mouse can makesmooth movements in straight, 90 degree turns and 180 degree turns.The randomly organized <strong>maze</strong> field had proved the efficiency of thealgorithm implement on the <strong>robot</strong>. All the other individual components such as thesensors, battery, stepper motors, LCD display and castor had also successfully playedtheir role as part of the system. The mechanism and structure for the <strong>robot</strong> work wellin terms of the stability of the <strong>robot</strong>.The objective for the electronic parts had been achieved since the main boardand the motor board link to each other to produce good interactive controllingprocess. Not much circuit debugging error had been encounter in the whole circuit