DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...
DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...
DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
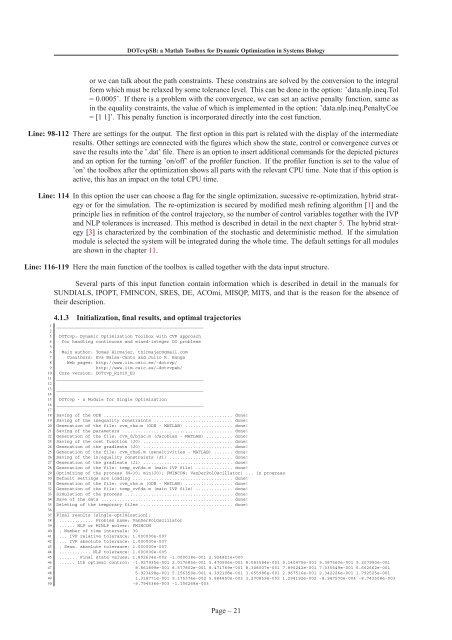
<strong>DOTcvpSB</strong>: a <strong>Matlab</strong> <strong>Toolbox</strong> <strong>for</strong> <strong>Dynamic</strong> <strong>Optimization</strong> <strong>in</strong> <strong>Systems</strong> Biologyor we can talk about the path constra<strong>in</strong>ts. These constra<strong>in</strong>s are solved by the conversion to the <strong>in</strong>tegral<strong>for</strong>m which must be relaxed by some tolerance level. This can be done <strong>in</strong> the option: ’data.nlp.<strong>in</strong>eq.Tol= 0.0005’. If there is a problem with the convergence, we can set an active penalty function, same as<strong>in</strong> the equality constra<strong>in</strong>ts, the value of which is implemented <strong>in</strong> the option: ’data.nlp.<strong>in</strong>eq.PenaltyCoe= [1 1]’. This penalty function is <strong>in</strong>corporated directly <strong>in</strong>to the cost function.L<strong>in</strong>e: 98-112 There are sett<strong>in</strong>gs <strong>for</strong> the output. The first option <strong>in</strong> this part is related with the display of the <strong>in</strong>termediateresults. Other sett<strong>in</strong>gs are connected with the figures which show the state, control or convergence curves orsave the results <strong>in</strong>to the ’.dat’ file. There is an option to <strong>in</strong>sert additional commands <strong>for</strong> the depicted picturesand an option <strong>for</strong> the turn<strong>in</strong>g ’on/off’ of the profiler function. If the profiler function is set to the value of’on’ the toolbox after the optimization shows all parts with the relevant CPU time. Note that if this option isactive, this has an impact on the total CPU time.L<strong>in</strong>e: 114 In this option the user can choose a flag <strong>for</strong> the s<strong>in</strong>gle optimization, sucessive re-optimization, hybrid strategyor <strong>for</strong> the simulation. The re-optimization is secured by modified mesh ref<strong>in</strong><strong>in</strong>g algorithm [1] and thepr<strong>in</strong>ciple lies <strong>in</strong> ref<strong>in</strong>ition of the control trajectory, so the number of control variables together with the IVPand NLP tolerances is <strong>in</strong>creased. This method is described <strong>in</strong> detail <strong>in</strong> the next chapter 5. The hybrid strategy[3] is characterized by the comb<strong>in</strong>ation of the stochastic and determ<strong>in</strong>istic method. If the simulationmodule is selected the system will be <strong>in</strong>tegrated dur<strong>in</strong>g the whole time. The default sett<strong>in</strong>gs <strong>for</strong> all modulesare shown <strong>in</strong> the chapter 11.L<strong>in</strong>e: 116-119 Here the ma<strong>in</strong> function of the toolbox is called together with the data <strong>in</strong>put structure.Several parts of this <strong>in</strong>put function conta<strong>in</strong> <strong>in</strong><strong>for</strong>mation which is described <strong>in</strong> detail <strong>in</strong> the manuals <strong>for</strong>SUNDIALS, IPOPT, FMINCON, SRES, DE, ACOmi, MISQP, MITS, and that is the reason <strong>for</strong> the absence oftheir description.4.1.3 Initialization, f<strong>in</strong>al results, and optimal trajectories1 ________________________________________________________23 DOTcvp: <strong>Dynamic</strong> <strong>Optimization</strong> <strong>Toolbox</strong> with CVP approach4 <strong>for</strong> handl<strong>in</strong>g cont<strong>in</strong>uous and mixed-<strong>in</strong>teger DO problems56 Ma<strong>in</strong> author: Tomas Hirmajer, thirmajer@gmail.com7 Coauthors: Eva Balsa-Canto and Julio R. Banga8 Web pages: http://www.iim.csic.es/~dotcvp/9 http://www.iim.csic.es/~dotcvpsb/10 Core version: DOTcvp_R2010_E311 ________________________________________________________1213 ________________________________________________________1415 DOTcvp - a Module <strong>for</strong> S<strong>in</strong>gle <strong>Optimization</strong>16 ________________________________________________________1718 Sav<strong>in</strong>g of the ODE ................................................. done!19 Sav<strong>in</strong>g of the <strong>in</strong>equality constra<strong>in</strong>ts .............................. done!20 Generation of the file: cvm_rhs.m (ODE - MATLAB) .................. done!21 Sav<strong>in</strong>g of the parameters .......................................... done!22 Generation of the file: cvm_d/bjac.m (Jacobian - MATLAB) .......... done!23 Sav<strong>in</strong>g of the cost function (J0) .................................. done!24 Generation of the gradients (J0) .................................. done!25 Generation of the file: cvm_rhsS.m (sensitivities - MATLAB) ....... done!26 Sav<strong>in</strong>g of the <strong>in</strong>/equality constra<strong>in</strong>ts (Ji) ........................ done!27 Generation of the gradients (Ji) .................................. done!28 Generation of the file: temp_cvfdx.m (ma<strong>in</strong> IVP file) .............. done!29 Optimiz<strong>in</strong>g of the process (N=30; m<strong>in</strong>(J0); FMINCON; VanDerPolOscillator) ... <strong>in</strong> progress30 Default sett<strong>in</strong>gs are load<strong>in</strong>g ...................................... done!31 Generation of the file: cvm_rhs.m (ODE - MATLAB) .................. done!32 Generation of the file: temp_cvfdx.m (ma<strong>in</strong> IVP file) .............. done!33 Simulation of the process ......................................... done!34 Save of the data .................................................. done!35 Delet<strong>in</strong>g of the temporary files ................................... done!36 ____________________________37 F<strong>in</strong>al results [s<strong>in</strong>gle-optimization]:38 ............. Problem name: VanDerPolOscillator39 ...... NLP or MINLP solver: FMINCON40 . Number of time <strong>in</strong>tervals: 3041 ... IVP relative tolerance: 1.000000e-00742 ... IVP absolute tolerance: 1.000000e-00743 . Sens. absolute tolerance: 1.000000e-00744 ............ NLP tolerance: 1.000000e-00545 ....... F<strong>in</strong>al state values: 1.892634e-002 -1.000018e-001 2.924821e+00046 ...... 1th optimal control: -1.927935e-001 2.017685e-001 5.470906e-001 8.083584e-001 9.140475e-001 9.387560e-001 9.207990e-00147 8.861899e-001 8.577802e-001 8.471769e-001 8.308007e-001 7.890242e-001 7.335549e-001 6.662662e-00148 5.923498e-001 5.156350e-001 4.392108e-001 3.655986e-001 2.967516e-001 2.342226e-001 1.792525e-00149 1.318771e-001 9.175374e-002 5.884850e-002 3.270859e-002 1.294192e-002 -8.947570e-004 -8.743508e-00350 -9.794536e-003 -1.106268e-003Page – 21