DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...
DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...
DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
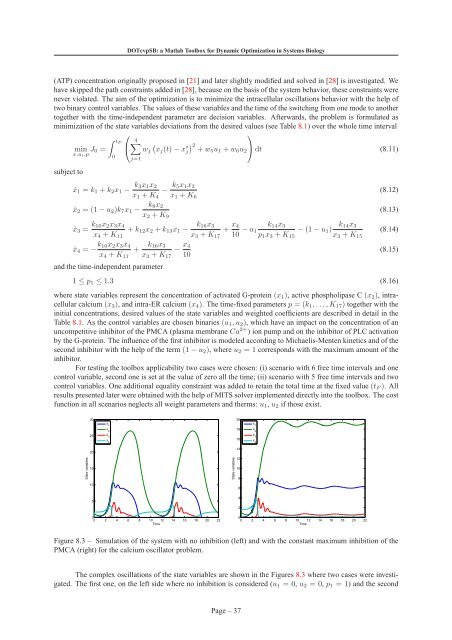
<strong>DOTcvpSB</strong>: a <strong>Matlab</strong> <strong>Toolbox</strong> <strong>for</strong> <strong>Dynamic</strong> <strong>Optimization</strong> <strong>in</strong> <strong>Systems</strong> Biology(ATP) concentration orig<strong>in</strong>ally proposed <strong>in</strong> [21] and later slightly modified and solved <strong>in</strong> [28] is <strong>in</strong>vestigated. Wehave skipped the path constra<strong>in</strong>ts added <strong>in</strong> [28], because on the basis of the system behavior, these constra<strong>in</strong>ts werenever violated. The aim of the optimization is to m<strong>in</strong>imize the <strong>in</strong>tracellular oscillations behavior with the help oftwo b<strong>in</strong>ary control variables. The values of these variables and the time of the switch<strong>in</strong>g from one mode to anothertogether with the time-<strong>in</strong>dependent parameter are decision variables. Afterwards, the problem is <strong>for</strong>mulated asm<strong>in</strong>imization of the state variables deviations from the desired values (see Table 8.1) over the whole time <strong>in</strong>tervalsubject to∫ tFm<strong>in</strong> J 0 =x,u i,p0⎛⎝4∑j=1⎞(w j xj (t)−x s ) 2j +w5 u 1 +w 6 u 2⎠dt (8.11)ẋ 1 = k 1 +k 2 x 1 − k 3x 1 x 2x 1 +K 4− k 5x 1 x 3x 1 +K 6(8.12)ẋ 2 = (1−u 2 )k 7 x 1 − k 8x 2x 2 +K 9(8.13)ẋ 3 = k 10x 2 x 3 x 4+k 12 x 2 +k 13 x 1 − k 16x 3+ x 4x 4 +K 11 x 3 +K 17 10 −u k 14 x 3 k 14 x 31 −(1−u 1 )p 1 x 3 +K 15 x 3 +K 15(8.14)ẋ 4 = − k 10x 2 x 3 x 4x 4 +K 11+ k 16x 3x 3 +K 17− x 410and the time-<strong>in</strong>dependent parameter(8.15)1 ≤ p 1 ≤ 1.3 (8.16)where state variables represent the concentration of activated G-prote<strong>in</strong> (x 1 ), active phospholipase C (x 2 ), <strong>in</strong>tracellularcalcium (x 3 ), and <strong>in</strong>tra-ER calcium (x 4 ). The time-fixed parameters p = (k 1 ,...,K 17 ) together with the<strong>in</strong>itial concentrations, desired values of the state variables and weighted coefficients are described <strong>in</strong> detail <strong>in</strong> theTable 8.1. As the control variables are chosen b<strong>in</strong>aries (u 1 ,u 2 ), which have an impact on the concentration of anuncompetitive <strong>in</strong>hibitor of the PMCA (plasma membrane Ca 2+ ) ion pump and on the <strong>in</strong>hibitor of PLC activationby the G-prote<strong>in</strong>. The <strong>in</strong>fluence of the first <strong>in</strong>hibitor is modeled accord<strong>in</strong>g to Michaelis-Menten k<strong>in</strong>etics and of thesecond <strong>in</strong>hibitor with the help of the term (1−u 2 ), where u 2 = 1 corresponds with the maximum amount of the<strong>in</strong>hibitor.For test<strong>in</strong>g the toolbox applicability two cases were chosen: (i) scenario with 6 free time <strong>in</strong>tervals and onecontrol variable, second one is set at the value of zero all the time; (ii) scenario with 5 free time <strong>in</strong>tervals and twocontrol variables. One additional equality constra<strong>in</strong>t was added to reta<strong>in</strong> the total time at the fixed value (t F ). Allresults presented later were obta<strong>in</strong>ed with the help of MITS solver implemented directly <strong>in</strong>to the toolbox. The costfunction <strong>in</strong> all scenarios neglects all weight parameters and therms: u 1 ,u 2 if those exist.3020x 1x 1x 218x 225x 316x 40 2 4 6 8 10 12 14 16 18 20 22x 3x 4State variables201510State variables1412108654200 2 4 6 8 10 12 14 16 18 20 22Time0TimeFigure 8.3 – Simulation of the system with no <strong>in</strong>hibition (left) and with the constant maximum <strong>in</strong>hibition of thePMCA (right) <strong>for</strong> the calcium oscillator problem.The complex oscillations of the state variables are shown <strong>in</strong> the Figures 8.3 where two cases were <strong>in</strong>vestigated.The first one, on the left side where no <strong>in</strong>hibition is considered (u 1 = 0, u 2 = 0, p 1 = 1) and the secondPage – 37