DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...
DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...
DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
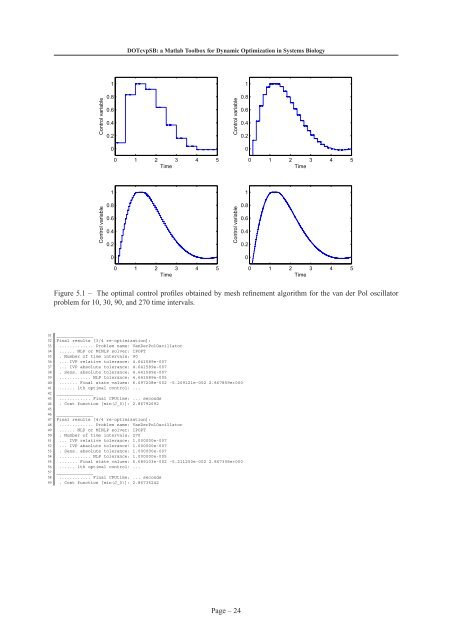
<strong>DOTcvpSB</strong>: a <strong>Matlab</strong> <strong>Toolbox</strong> <strong>for</strong> <strong>Dynamic</strong> <strong>Optimization</strong> <strong>in</strong> <strong>Systems</strong> BiologyControl variable10.80.60.40.20Control variable10.80.60.40.200 1 2 3 4 5Time0 1 2 3 4 5TimeControl variable10.80.60.40.20Control variable10.80.60.40.200 1 2 3 4 5Time0 1 2 3 4 5TimeFigure 5.1 – The optimal control profiles obta<strong>in</strong>ed by mesh ref<strong>in</strong>ement algorithm <strong>for</strong> the van der Pol oscillatorproblem <strong>for</strong> 10, 30, 90, and 270 time <strong>in</strong>tervals.31 ______________32 F<strong>in</strong>al results [3/4 re-optimization]:33 ............. Problem name: VanDerPolOscillator34 ...... NLP or MINLP solver: IPOPT35 . Number of time <strong>in</strong>tervals: 9036 ... IVP relative tolerance: 4.641589e-00737 ... IVP absolute tolerance: 4.641589e-00738 . Sens. absolute tolerance: 4.641589e-00739 ............ NLP tolerance: 4.641589e-00540 ....... F<strong>in</strong>al state values: 6.697208e-002 -5.209121e-002 2.867859e+00041 ...... 1th optimal control: ...42 ______________43 ............ F<strong>in</strong>al CPUtime: ... seconds44 . Cost function [m<strong>in</strong>(J_0)]: 2.867926924546 ______________47 F<strong>in</strong>al results [4/4 re-optimization]:48 ............. Problem name: VanDerPolOscillator49 ...... NLP or MINLP solver: IPOPT50 . Number of time <strong>in</strong>tervals: 27051 ... IVP relative tolerance: 1.000000e-00752 ... IVP absolute tolerance: 1.000000e-00753 . Sens. absolute tolerance: 1.000000e-00754 ............ NLP tolerance: 1.000000e-00555 ....... F<strong>in</strong>al state values: 6.689103e-002 -5.211250e-002 2.867308e+00056 ...... 1th optimal control: ...57 ______________58 ............ F<strong>in</strong>al CPUtime: ... seconds59 . Cost function [m<strong>in</strong>(J_0)]: 2.86735242Page – 24