DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...
DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...
DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
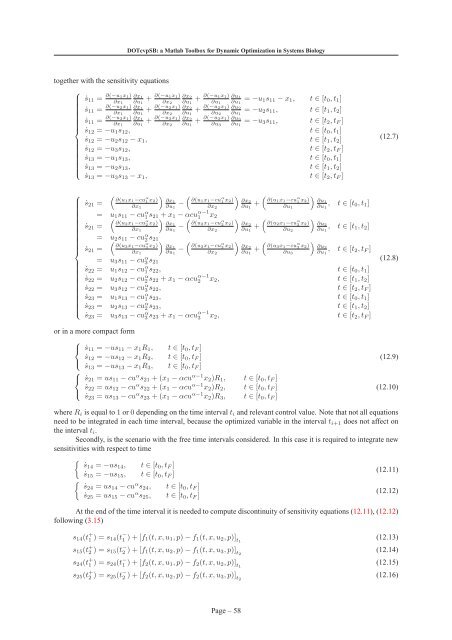
<strong>DOTcvpSB</strong>: a <strong>Matlab</strong> <strong>Toolbox</strong> <strong>for</strong> <strong>Dynamic</strong> <strong>Optimization</strong> <strong>in</strong> <strong>Systems</strong> Biologytogether with the sensitivity equations⎧ṡ 11 = ∂(−u1x1) ∂x 1∂x 1 ∂u 1+ ∂(−u1x1) ∂x 2∂x 2 ∂u 1+ ∂(−u1x1) ∂u 1∂u 1 ∂u 1= −u 1 s 11 −x 1 , t ∈ [t 0 ,t 1 ]ṡ 11 = ∂(−u2x1) ∂x 1∂x 1 ∂u 1+ ∂(−u2x1) ∂x 2∂x 2 ∂u 1+ ∂(−u2x1) ∂u 2∂u 2 ∂u 1= −u 2 s 11 , t ∈ [t 1 ,t 2 ]ṡ 11 = ∂(−u3x1) ∂x 1∂x 1 ∂u 1+ ∂(−u3x1) ∂x 2∂x 2 ∂u 1+ ∂(−u3x1) ∂u 3∂u 3 ∂u 1= −u 3 s 11 , t ∈ [t 2 ,t F ]⎪⎨ ṡ 12 = −u 1 s 12 , t ∈ [t 0 ,t 1 ]ṡ 12 = −u 2 s 12 −x 1 , t ∈ [t 1 ,t 2 ]ṡ 12 = −u 3 s 12 , t ∈ [t 2 ,t F ]ṡ 13 = −u 1 s 13 , t ∈ [t 0 ,t 1 ]ṡ ⎪⎩ 13 = −u 2 s 13 , t ∈ [t 1 ,t 2 ]ṡ 13 = −u 3 s 13 −x 1 , t ∈ [t 2 ,t F ]⎧⎪⎨⎪⎩ṡ 21 =ṡ 21 =( ) ( )∂(u1x 1−cu α 1 x2) ∂x 1 ∂(u1x∂x 1 ∂u 1− 1−cu α 1 x2)∂x 2= u 1 s 11 −cu α 1s 21 +x 1 −αcu α−1( )∂(u2x 1−cu α 2 x2)∂x 1= u 2 s 11 −cu α 2s 21∂x 1∂u 1−( 1 x 2 )∂(u2x 1−cu α 2 x2)∂x 2( )∂x 2 ∂(u1x∂u 1+ 1−cu α 1 x2) ∂u 1∂u 1 ∂u 1, t ∈ [t 0 ,t 1 ]( )∂x 2 ∂(u2x∂u 1+ 1−cu α 2 x2) ∂u 2∂u 2 ∂u 1, t ∈ [t 1 ,t 2 ]( ) ( ) ( )∂(u3xṡ 21 = 1−cu α 3 x2) ∂x 1 ∂(u3x∂x 1 ∂u 1− 1−cu α 3 x2) ∂x 2 ∂(u3x∂x 2 ∂u 1+ 1−cu α 3 x2) ∂u 3∂u 3 ∂u 1, t ∈ [t 2 ,t F ]= u 3 s 11 −cu α 3s 21ṡ 22 = u 1 s 12 −cu α 1s 22 , t ∈ [t 0 ,t 1 ]ṡ 22 = u 2 s 12 −cu α 2s 22 +x 1 −αcu α−12 x 2 , t ∈ [t 1 ,t 2 ]ṡ 22 = u 3 s 12 −cu α 3s 22 , t ∈ [t 2 ,t F ]ṡ 23 = u 1 s 13 −cu α 1s 23 , t ∈ [t 0 ,t 1 ]ṡ 23 = u 2 s 13 −cu α 2s 23 , t ∈ [t 1 ,t 2 ]ṡ 23 = u 3 s 13 −cu α 3s 23 +x 1 −αcu α−13 x 2 , t ∈ [t 2 ,t F ]or <strong>in</strong> a more compact <strong>for</strong>m⎧⎨⎩⎧⎨⎩ṡ 11 = −us 11 −x 1 R 1 , t ∈ [t 0 ,t F ]ṡ 12 = −us 12 −x 1 R 2 , t ∈ [t 0 ,t F ]ṡ 13 = −us 13 −x 1 R 3 , t ∈ [t 0 ,t F ]ṡ 21 = us 11 −cu α s 21 +(x 1 −αcu α−1 x 2 )R 1 , t ∈ [t 0 ,t F ]ṡ 22 = us 12 −cu α s 22 +(x 1 −αcu α−1 x 2 )R 2 , t ∈ [t 0 ,t F ]ṡ 23 = us 13 −cu α s 23 +(x 1 −αcu α−1 x 2 )R 3 , t ∈ [t 0 ,t F ](12.7)(12.8)(12.9)(12.10)whereR i is equal to1or0depend<strong>in</strong>g on the time <strong>in</strong>tervalt i and relevant control value. Note that not all equationsneed to be <strong>in</strong>tegrated <strong>in</strong> each time <strong>in</strong>terval, because the optimized variable <strong>in</strong> the <strong>in</strong>terval t i+1 does not affect onthe <strong>in</strong>terval t i .Secondly, is the scenario with the free time <strong>in</strong>tervals considered. In this case it is required to <strong>in</strong>tegrate newsensitivities with respect to time{ṡ14 = −us 14 , t ∈ [t 0 ,t F ](12.11)ṡ 15 = −us 15 , t ∈ [t 0 ,t F ]{ṡ24 = us 14 −cu α s 24 , t ∈ [t 0 ,t F ]ṡ 25 = us 15 −cu α (12.12)s 25 , t ∈ [t 0 ,t F ]At the end of the time <strong>in</strong>terval it is needed to compute discont<strong>in</strong>uity of sensitivity equations (12.11), (12.12)follow<strong>in</strong>g (3.15)s 14 (t + 1 ) = s 14(t − 1 )+[f 1(t,x,u 1 ,p)−f 1 (t,x,u 2 ,p)] t1(12.13)s 15 (t + 2 ) = s 15(t − 2 )+[f 1(t,x,u 2 ,p)−f 1 (t,x,u 3 ,p)] t2(12.14)s 24 (t + 1 ) = s 24(t − 1 )+[f 2(t,x,u 1 ,p)−f 2 (t,x,u 2 ,p)] t1(12.15)s 25 (t + 2 ) = s 25(t − 2 )+[f 2(t,x,u 2 ,p)−f 2 (t,x,u 3 ,p)] t2(12.16)Page – 58