DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...
DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...
DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
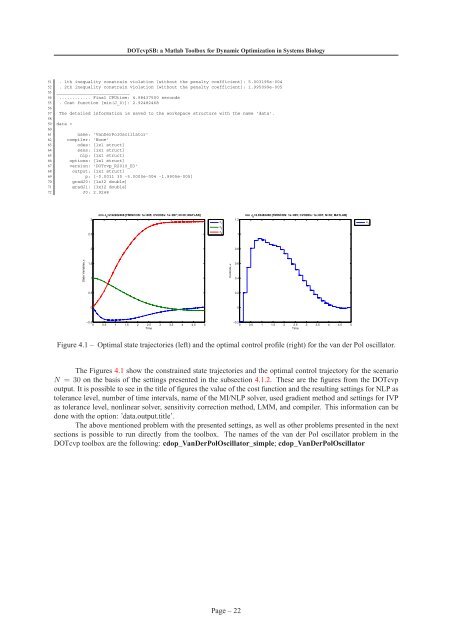
x 2<strong>DOTcvpSB</strong>: a <strong>Matlab</strong> <strong>Toolbox</strong> <strong>for</strong> <strong>Dynamic</strong> <strong>Optimization</strong> <strong>in</strong> <strong>Systems</strong> Biology51 . 1th <strong>in</strong>equality constra<strong>in</strong> violation [without the penalty coefficient]: 5.003195e-00452 . 2th <strong>in</strong>equality constra<strong>in</strong> violation [without the penalty coefficient]: 1.995099e-00553 ____________________________54 ............ F<strong>in</strong>al CPUtime: 4.98437500 seconds55 . Cost function [m<strong>in</strong>(J_0)]: 2.924824685657 The detailed <strong>in</strong><strong>for</strong>mation is saved to the workspace structure with the name 'data'.5859 data =6061 name: 'VanDerPolOscillator'62 compiler: 'None'63 odes: [1x1 struct]64 sens: [1x1 struct]65 nlp: [1x1 struct]66 options: [1x1 struct]67 version: 'DOTcvp_R2010_E3'68 output: [1x1 struct]69 p: [-0.0011 30 -5.0000e-004 -1.9905e-005]70 gradJ0: [1x32 double]71 gradJi: [3x32 double]72 J0: 2.9248m<strong>in</strong> J 0=2.92482468 [FMINCON: 1e−005; CVODEs: 1e−007; N=30; MATLAB]m<strong>in</strong> J 0=2.92482468 [FMINCON: 1e−005; CVODEs: 1e−007; N=30; MATLAB]31.2x 1u 12.5120.8State Variables, x1.51Controls, ux 30 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50.60.40.50.200−0.50 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5Time−0.2TimeFigure 4.1 – Optimal state trajectories (left) and the optimal control profile (right) <strong>for</strong> the van der Pol oscillator.The Figures 4.1 show the constra<strong>in</strong>ed state trajectories and the optimal control trajectory <strong>for</strong> the scenarioN = 30 on the basis of the sett<strong>in</strong>gs presented <strong>in</strong> the subsection 4.1.2. These are the figures from the DOTcvpoutput. It is possible to see <strong>in</strong> the title of figures the value of the cost function and the result<strong>in</strong>g sett<strong>in</strong>gs <strong>for</strong> NLP astolerance level, number of time <strong>in</strong>tervals, name of the MI/NLP solver, used gradient method and sett<strong>in</strong>gs <strong>for</strong> IVPas tolerance level, nonl<strong>in</strong>ear solver, sensitivity correction method, LMM, and compiler. This <strong>in</strong><strong>for</strong>mation can bedone with the option: ’data.output.title’.The above mentioned problem with the presented sett<strong>in</strong>gs, as well as other problems presented <strong>in</strong> the nextsections is possible to run directly from the toolbox. The names of the van der Pol oscillator problem <strong>in</strong> theDOTcvp toolbox are the follow<strong>in</strong>g: cdop_VanDerPolOscillator_simple; cdop_VanDerPolOscillatorPage – 22