DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...
DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...
DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
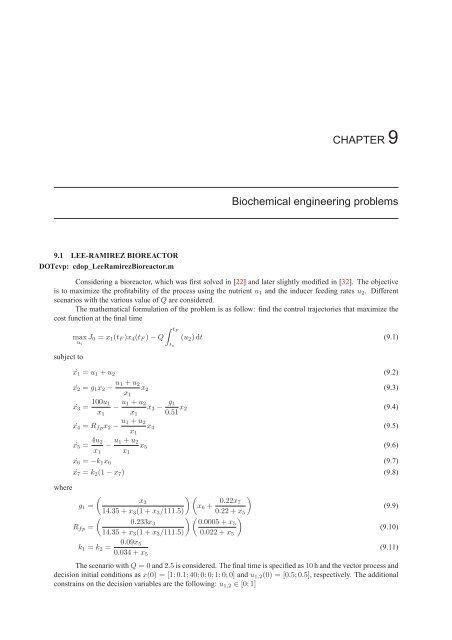
CHAPTER 9Biochemical eng<strong>in</strong>eer<strong>in</strong>g problems9.1 LEE-RAMIREZ BIOREACTORDOTcvp: cdop_LeeRamirezBioreactor.mConsider<strong>in</strong>g a bioreactor, which was first solved <strong>in</strong> [22] and later slightly modified <strong>in</strong> [32]. The objectiveis to maximize the profitability of the process us<strong>in</strong>g the nutrient u 1 and the <strong>in</strong>ducer feed<strong>in</strong>g rates u 2 . Differentscenarios with the various value ofQare considered.The mathematical <strong>for</strong>mulation of the problem is as follow: f<strong>in</strong>d the control trajectories that maximize thecost function at the f<strong>in</strong>al timesubject tomaxJ 0 = x 1 (t F )x 4 (t F )−Qu i∫ tFt o(u 2 )dt (9.1)x˙1 = u 1 +u 2 (9.2)x˙2 = g 1 x 2 − u 1 +u 2x 2 (9.3)x 1x˙3 = 100u 1− u 1 +u 2x 3 − g 1x 1 x 1 0.51 x 2 (9.4)x˙4 = R fp x 2 − u 1 +u 2x 4 (9.5)x 1x˙5 = 4u 2− u 1 +u 2x 5x 1 x 1(9.6)x˙6 = −k 1 x 6 (9.7)x˙7 = k 2 (1−x 7 ) (9.8)where()(x 3g 1 =x 6 + 0.22x )714.35+x 3 (1+x 3 /111.5) 0.22+x 5()( )0.233x 3 0.0005+x5R fp =14.35+x 3 (1+x 3 /111.5) 0.022+x 5(9.9)(9.10)k 1 = k 2 = 0.09x 50.034+x 5(9.11)The scenario withQ = 0 and2.5 is considered. The f<strong>in</strong>al time is specified as10 h and the vector process anddecision <strong>in</strong>itial conditions as x(0) = [1;0.1;40;0;0;1;0;0] and u 1,2 (0) = [0.5;0.5], respectively. The additionalconstra<strong>in</strong>s on the decision variables are the follow<strong>in</strong>g: u 1,2 ∈ [0;1]