DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...
DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...
DOTcvpSB: a Matlab Toolbox for Dynamic Optimization in Systems ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
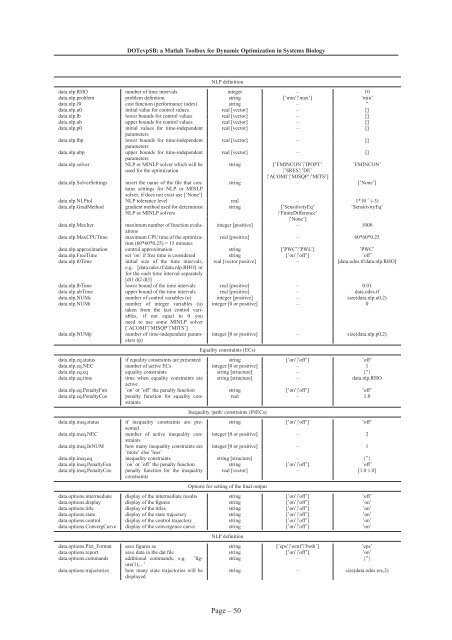
<strong>DOTcvpSB</strong>: a <strong>Matlab</strong> <strong>Toolbox</strong> <strong>for</strong> <strong>Dynamic</strong> <strong>Optimization</strong> <strong>in</strong> <strong>Systems</strong> BiologyNLP def<strong>in</strong>itiondata.nlp.RHO number of time <strong>in</strong>tervals <strong>in</strong>teger – 10data.nlp.problem problem def<strong>in</strong>ition str<strong>in</strong>g [’m<strong>in</strong>’|’max’] ’m<strong>in</strong>’data.nlp.J0 cost function (per<strong>for</strong>mance <strong>in</strong>dex) str<strong>in</strong>g – ”data.nlp.u0 <strong>in</strong>itial value <strong>for</strong> control values real [vector] – []data.nlp.lb lower bounds <strong>for</strong> control values real [vector] – []data.nlp.ub upper bounds <strong>for</strong> control values real [vector] – []data.nlp.p0<strong>in</strong>itial values <strong>for</strong> time-<strong>in</strong>dependent real [vector] – []parametersdata.nlp.lbplower bounds <strong>for</strong> time-<strong>in</strong>dependent real [vector] – []parametersdata.nlp.ubpupper bounds <strong>for</strong> time-<strong>in</strong>dependent real [vector] – []parametersdata.nlp.solver NLP or MINLP solver which will be str<strong>in</strong>g [’FMINCON’|’IPOPT’ ’FMINCON’used <strong>for</strong> the optimization|’SRES’|’DE’data.nlp.SolverSett<strong>in</strong>gs<strong>in</strong>sert the name of the file that conta<strong>in</strong>ssett<strong>in</strong>gs <strong>for</strong> NLP or MINLPsolver, if does not exist use [’None’]|’ACOMI’|’MISQP’|’MITS’]str<strong>in</strong>g – [’None’]data.nlp.NLPtol NLP tolerance level real – 1*10 ˆ (-5)data.nlp.GradMethod gradient method used <strong>for</strong> determ<strong>in</strong>ist str<strong>in</strong>g [’SensitivityEq’ ’SensitivityEq’NLP or MINLP solvers|’F<strong>in</strong>iteDifference’|’None’]data.nlp.MaxItermaximum number of function evaluations<strong>in</strong>teger [positive] – 1000data.nlp.MaxCPUTime maximum CPU time of the optimizationreal [positive] – 60*60*0.25(60*60*0.25) = 15 m<strong>in</strong>utesdata.nlp.approximation control approximation str<strong>in</strong>g [’PWC’|’PWL’] ’PWC’data.nlp.FreeTime set ’on’ if free time is considered str<strong>in</strong>g [’on’|’off’] ’off’data.nlp.t0Time<strong>in</strong>itial size of the time <strong>in</strong>tervals, real [vector positve] – [data.odes.tf/data.nlp.RHO]e.g. [data.odes.tf/data.nlp.RHO] or<strong>for</strong> the each time <strong>in</strong>terval separately[dt1 dt2 dt3]data.nlp.lbTime lower bound of the time <strong>in</strong>tervals real [positive] – 0.01data.nlp.ubTime upper bound of the time <strong>in</strong>tervals real [positive] – data.odes.tfdata.nlp.NUMc number of control variables (u) <strong>in</strong>teger [positive] – size(data.nlp.u0,2)data.nlp.NUMi number of <strong>in</strong>teger variables (u)taken from the last control variables,if not equal to 0 youneed to use some MINLP solver[’ACOMI’|’MISQP’|’MITS’]data.nlp.NUMpnumber of time-<strong>in</strong>dependent parameters(p)<strong>in</strong>teger [0 or positive] – 0<strong>in</strong>teger [0 or positive] – size(data.nlp.p0,2)Equality constra<strong>in</strong>ts (ECs)data.nlp.eq.status if equality constra<strong>in</strong>ts are presented str<strong>in</strong>g [’on’|’off’] ’off’data.nlp.eq.NEC number of active ECs <strong>in</strong>teger [0 or positive] – 1data.nlp.eq.eq equality constra<strong>in</strong>ts str<strong>in</strong>g [structure] – {”}data.nlp.eq.timetime when equality constra<strong>in</strong>ts are str<strong>in</strong>g [structure] – data.nlp.RHOactivedata.nlp.eq.PenaltyFun ’on’ or ’off’ the penalty function str<strong>in</strong>g [’on’|’off’] ’off’data.nlp.eq.PenaltyCoe penalty function <strong>for</strong> equality constra<strong>in</strong>tsreal – 1.0Inequality /path/ constra<strong>in</strong>ts (INECs)data.nlp.<strong>in</strong>eq.status if <strong>in</strong>equality constra<strong>in</strong>ts are presentedstr<strong>in</strong>g [’on’|’off’] ’off’data.nlp.<strong>in</strong>eq.NECnumber of active <strong>in</strong>equality constra<strong>in</strong>ts<strong>in</strong>teger [0 or positive] – 2data.nlp.<strong>in</strong>eq.InNUM how many <strong>in</strong>equality constra<strong>in</strong>ts are <strong>in</strong>teger [0 or positive] – 1’more’ else ’less’data.nlp.<strong>in</strong>eq.eq <strong>in</strong>equality constra<strong>in</strong>ts str<strong>in</strong>g [structure] – {”}data.nlp.<strong>in</strong>eq.PenaltyFun ’on’ or ’off’ the penalty function str<strong>in</strong>g [’on’|’off’] ’off’data.nlp.<strong>in</strong>eq.PenaltyCoe penalty function <strong>for</strong> the <strong>in</strong>equalityconstra<strong>in</strong>tsreal [vector] – [1.0 1.0]Options <strong>for</strong> sett<strong>in</strong>g of the f<strong>in</strong>al outputdata.options.<strong>in</strong>termediate display of the <strong>in</strong>termediate results str<strong>in</strong>g [’on’|’off’] ’off’data.options.display display of the figures str<strong>in</strong>g [’on’|’off’] ’on’data.options.title display of the titles str<strong>in</strong>g [’on’|’off’] ’on’data.options.state display of the state trajectory str<strong>in</strong>g [’on’|’off’] ’on’data.options.control display of the control trajectory str<strong>in</strong>g [’on’|’off’] ’on’data.options.ConvergCurve display of the convergence curve str<strong>in</strong>g [’on’|’off’] ’on’NLP def<strong>in</strong>itiondata.options.Pict_Format save figures as str<strong>in</strong>g [’eps’|’wmf’|’both’] ’eps’data.options.report save data <strong>in</strong> the dat file str<strong>in</strong>g [’on’|’off’] ’on’data.options.commands additional commands, e.g. ’figure(1),..str<strong>in</strong>g – {”}’data.options.trajectories how many state trajectories will bedisplayedstr<strong>in</strong>g – size(data.odes.res,2)Page – 50