線性非時變系統之即時參數估測 - 高雄應用科技大學
線性非時變系統之即時參數估測 - 高雄應用科技大學
線性非時變系統之即時參數估測 - 高雄應用科技大學

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
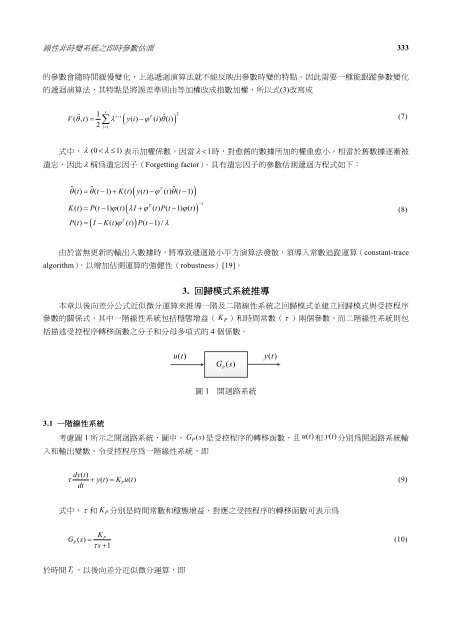
線 性 非 時 變 系 統 之 即 時 參 數 估 測 333的 參 數 會 隨 時 間 緩 慢 變 化 , 上 述 遞 迴 演 算 法 就 不 能 反 映 出 參 數 時 變 的 特 點 。 因 此 需 要 一 種 能 跟 蹤 參 數 變 化的 遞 迴 演 算 法 , 其 特 點 是 將 誤 差 準 則 由 等 加 權 改 成 指 數 加 權 , 所 以 式 (3) 改 寫 成tt iT∑ ()−ˆ 1V( θ, t) = λ y( i) −ϕ ( i) θ( i)2i=12ˆ (7)式 中 , λ (0 < λ ≤ 1) 表 示 加 權 係 數 。 因 當 λ < 1時 , 對 愈 舊 的 數 據 所 加 的 權 重 愈 小 , 相 當 於 舊 數 據 逐 漸 被遺 忘 , 因 此 λ 稱 為 遺 忘 因 子 (Forgetting factor)。 具 有 遺 忘 因 子 的 參 數 估 測 遞 迴 方 程 式 如 下 :( )$ $ Tθ() t = θ( t− 1) + K() t y() t −ϕ () t $ θ( t−1)(T( ϕ )TKt () = Pt ( − 1) ϕ() t λI+ ϕ () tPt ( −1) ϕ()tPt () = I−Kt () () t Pt ( −1)/λ1) −(8)由 於 當 無 更 新 的 輸 出 入 數 據 時 , 將 導 致 遞 迴 最 小 平 方 演 算 法 發 散 , 須 導 入 常 數 追 踨 運 算 (constant-tracealgorithm), 以 增 加 估 測 運 算 的 強 健 性 (robustness)[19]。3. 回 歸 模 式 系 統 推 導本 章 以 後 向 差 分 公 式 近 似 微 分 運 算 來 推 導 一 階 及 二 階 線 性 系 統 之 回 歸 模 式 並 建 立 回 歸 模 式 與 受 控 程 序參 數 的 關 係 式 , 其 中 一 階 線 性 系 統 包 括 穩 態 增 益 ( K P ) 和 時 間 常 數 (τ ) 兩 個 參 數 。 而 二 階 線 性 系 統 則 包括 描 述 受 控 程 序 轉 移 函 數 之 分 子 和 分 母 多 項 式 的 4 個 係 數 。ut ()yt ()G () sP圖 1開 迴 路 系 統3.1 一 階 線 性 系 統考 慮 圖 1 所 示 之 開 迴 路 系 統 , 圖 中 , GP () s 是 受 控 程 序 的 轉 移 函 數 , 且 ut () 和 yt () 分 別 為 開 迴 路 系 統 輸入 和 輸 出 變 數 。 令 受 控 程 序 為 一 階 線 性 系 統 , 即dy()tτ + y() t = KPu()t(9)dt式 中 ,τ 和K P 分 別 是 時 間 常 數 和 穩 態 增 益 , 對 應 之 受 控 程 序 的 轉 移 函 數 可 表 示 為KPGP() s =τ s + 1(10)於 時 間T i, 以 後 向 差 分 近 似 微 分 運 算 , 即