

Conception et implémentation en C++ d'un simulateur pour ... - CoDE
Conception et implémentation en C++ d'un simulateur pour ... - CoDE
Conception et implémentation en C++ d'un simulateur pour ... - CoDE

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
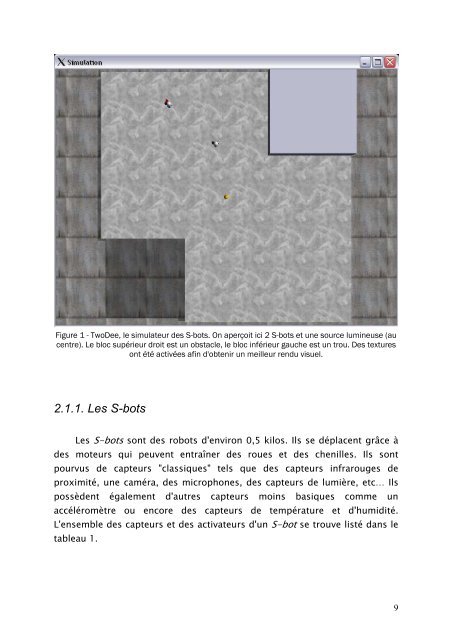
Figure 1 - TwoDee, le <strong>simulateur</strong> des S-bots. On aperçoit ici 2 S-bots <strong>et</strong> une source lumineuse (au<br />
c<strong>en</strong>tre). Le bloc supérieur droit est un obstacle, le bloc inférieur gauche est un trou. Des textures<br />
ont été activées afin d'obt<strong>en</strong>ir un meilleur r<strong>en</strong>du visuel.<br />
2.1.1. Les S-bots<br />
Les S-bots sont des robots d'<strong>en</strong>viron 0,5 kilos. Ils se déplac<strong>en</strong>t grâce à<br />
des moteurs qui peuv<strong>en</strong>t <strong>en</strong>traîner des roues <strong>et</strong> des ch<strong>en</strong>illes. Ils sont<br />
<strong>pour</strong>vus de capteurs "classiques" tels que des capteurs infrarouges de<br />
proximité, une caméra, des microphones, des capteurs de lumière, <strong>et</strong>c… Ils<br />
possèd<strong>en</strong>t égalem<strong>en</strong>t d'autres capteurs moins basiques comme un<br />
accéléromètre ou <strong>en</strong>core des capteurs de température <strong>et</strong> d'humidité.<br />
L'<strong>en</strong>semble des capteurs <strong>et</strong> des activateurs <strong>d'un</strong> S-bot se trouve listé dans le<br />
tableau 1.<br />
9













