

Conception et implémentation en C++ d'un simulateur pour ... - CoDE
Conception et implémentation en C++ d'un simulateur pour ... - CoDE
Conception et implémentation en C++ d'un simulateur pour ... - CoDE

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
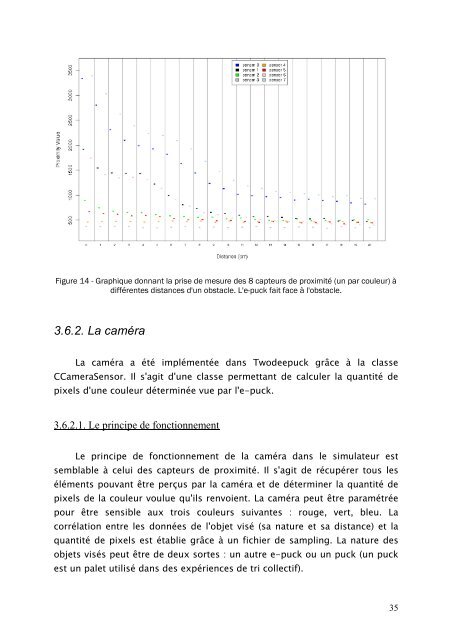
Figure 14 - Graphique donnant la prise de mesure des 8 capteurs de proximité (un par couleur) à<br />
différ<strong>en</strong>tes distances <strong>d'un</strong> obstacle. L'e-puck fait face à l'obstacle.<br />
3.6.2. La caméra<br />
La caméra a été implém<strong>en</strong>tée dans Twodeepuck grâce à la classe<br />
CCameraS<strong>en</strong>sor. Il s'agit <strong>d'un</strong>e classe perm<strong>et</strong>tant de calculer la quantité de<br />
pixels <strong>d'un</strong>e couleur déterminée vue par l'e-puck.<br />
3.6.2.1. Le principe de fonctionnem<strong>en</strong>t<br />
Le principe de fonctionnem<strong>en</strong>t de la caméra dans le <strong>simulateur</strong> est<br />
semblable à celui des capteurs de proximité. Il s'agit de récupérer tous les<br />
élém<strong>en</strong>ts pouvant être perçus par la caméra <strong>et</strong> de déterminer la quantité de<br />
pixels de la couleur voulue qu'ils r<strong>en</strong>voi<strong>en</strong>t. La caméra peut être paramétrée<br />
<strong>pour</strong> être s<strong>en</strong>sible aux trois couleurs suivantes : rouge, vert, bleu. La<br />
corrélation <strong>en</strong>tre les données de l'obj<strong>et</strong> visé (sa nature <strong>et</strong> sa distance) <strong>et</strong> la<br />
quantité de pixels est établie grâce à un fichier de sampling. La nature des<br />
obj<strong>et</strong>s visés peut être de deux sortes : un autre e-puck ou un puck (un puck<br />
est un pal<strong>et</strong> utilisé dans des expéri<strong>en</strong>ces de tri collectif).<br />
35













