

Conception et implémentation en C++ d'un simulateur pour ... - CoDE
Conception et implémentation en C++ d'un simulateur pour ... - CoDE
Conception et implémentation en C++ d'un simulateur pour ... - CoDE

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
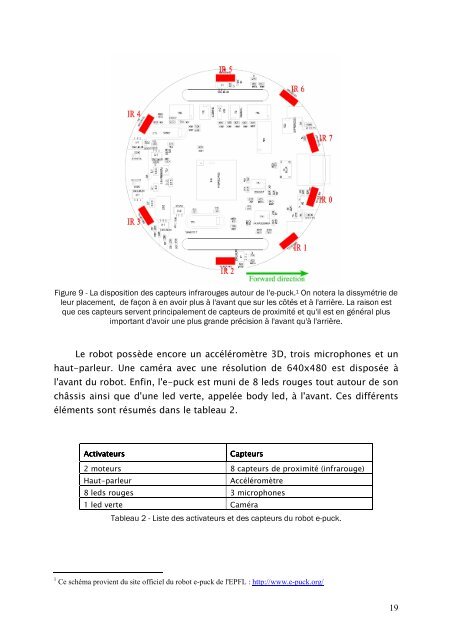
Figure 9 - La disposition des capteurs infrarouges autour de l'e-puck. 1 On notera la dissymétrie de<br />
leur placem<strong>en</strong>t, de façon à <strong>en</strong> avoir plus à l'avant que sur les côtés <strong>et</strong> à l'arrière. La raison est<br />
que ces capteurs serv<strong>en</strong>t principalem<strong>en</strong>t de capteurs de proximité <strong>et</strong> qu'il est <strong>en</strong> général plus<br />
important d'avoir une plus grande précision à l'avant qu'à l'arrière.<br />
Le robot possède <strong>en</strong>core un accéléromètre 3D, trois microphones <strong>et</strong> un<br />
haut-parleur. Une caméra avec une résolution de 640x480 est disposée à<br />
l'avant du robot. Enfin, l'e-puck est muni de 8 leds rouges tout autour de son<br />
châssis ainsi que <strong>d'un</strong>e led verte, appelée body led, à l'avant. Ces différ<strong>en</strong>ts<br />
élém<strong>en</strong>ts sont résumés dans le tableau 2.<br />
Activateurs Activateurs<br />
Capteurs<br />
Capteurs<br />
2 moteurs 8 capteurs de proximité (infrarouge)<br />
Haut-parleur Accéléromètre<br />
8 leds rouges 3 microphones<br />
1 led verte Caméra<br />
Tableau 2 - Liste des activateurs <strong>et</strong> des capteurs du robot e-puck.<br />
1 Ce schéma provi<strong>en</strong>t du site officiel du robot e-puck de l'EPFL : http://www.e-puck.org/<br />
19













