

Conception et implémentation en C++ d'un simulateur pour ... - CoDE
Conception et implémentation en C++ d'un simulateur pour ... - CoDE
Conception et implémentation en C++ d'un simulateur pour ... - CoDE

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
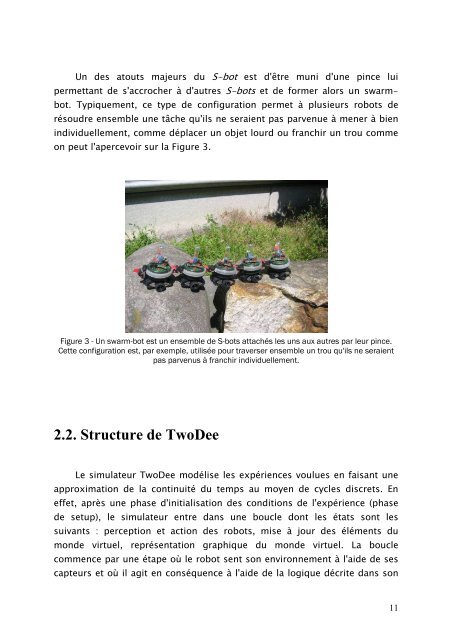
Un des atouts majeurs du S-bot est d'être muni <strong>d'un</strong>e pince lui<br />
perm<strong>et</strong>tant de s'accrocher à d'autres S-bots <strong>et</strong> de former alors un swarm-<br />
bot. Typiquem<strong>en</strong>t, ce type de configuration perm<strong>et</strong> à plusieurs robots de<br />
résoudre <strong>en</strong>semble une tâche qu'ils ne serai<strong>en</strong>t pas parv<strong>en</strong>ue à m<strong>en</strong>er à bi<strong>en</strong><br />
individuellem<strong>en</strong>t, comme déplacer un obj<strong>et</strong> lourd ou franchir un trou comme<br />
on peut l'apercevoir sur la Figure 3.<br />
Figure 3 - Un swarm-bot est un <strong>en</strong>semble de S-bots attachés les uns aux autres par leur pince.<br />
C<strong>et</strong>te configuration est, par exemple, utilisée <strong>pour</strong> traverser <strong>en</strong>semble un trou qu'ils ne serai<strong>en</strong>t<br />
pas parv<strong>en</strong>us à franchir individuellem<strong>en</strong>t.<br />
2.2. Structure de TwoDee<br />
Le <strong>simulateur</strong> TwoDee modélise les expéri<strong>en</strong>ces voulues <strong>en</strong> faisant une<br />
approximation de la continuité du temps au moy<strong>en</strong> de cycles discr<strong>et</strong>s. En<br />
eff<strong>et</strong>, après une phase d'initialisation des conditions de l'expéri<strong>en</strong>ce (phase<br />
de s<strong>et</strong>up), le <strong>simulateur</strong> <strong>en</strong>tre dans une boucle dont les états sont les<br />
suivants : perception <strong>et</strong> action des robots, mise à jour des élém<strong>en</strong>ts du<br />
monde virtuel, représ<strong>en</strong>tation graphique du monde virtuel. La boucle<br />
comm<strong>en</strong>ce par une étape où le robot s<strong>en</strong>t son <strong>en</strong>vironnem<strong>en</strong>t à l'aide de ses<br />
capteurs <strong>et</strong> où il agit <strong>en</strong> conséqu<strong>en</strong>ce à l'aide de la logique décrite dans son<br />
11













