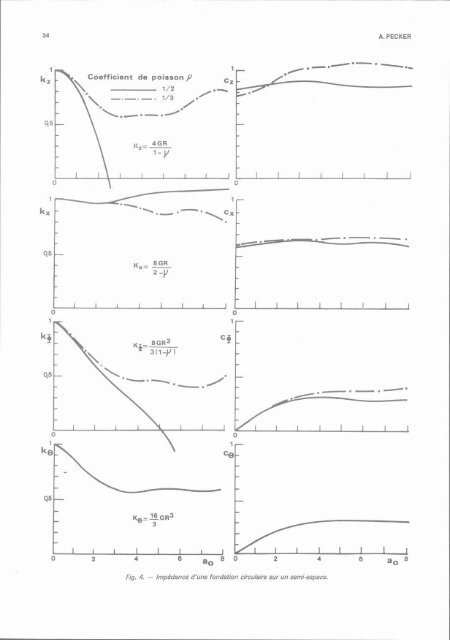
34C),sCoefficient de poisson)J~ 1/2 /e_., _._.._. 1/3 •. ,/''----.-.~.1CzA. PECKER------,..,.. • - •.------ e,...•K z= 4GR1- JIk xqsoe............~ -..--:.. • ."Cx1_e-e_.K x= aGR2-pqs.--..-.............----./-..""--_._.----o1kgQ5o 2 4 80 8Fig. 4. -Impédance d'une fondation circulaire sur un semi-espace.
COMPORTEMENT DES FONDATIONS SOUS SOLLICITATION SISMIQUE 35Mis à part <strong>le</strong>s parties réel<strong>le</strong>s k z et kcp de l'impédance entranslation vertica<strong>le</strong> et en balancement, <strong>le</strong>s autres coefficientssont pratiquement indépendants du coefficientde Poisson. De même <strong>le</strong>s coefficients c z' C x' k x nevarient que faib<strong>le</strong>ment avec la fréquence et on peut,avec une bonne approximation, <strong>le</strong>s considérer constants.Il en est de même pour k e, ce et c cp dès queaa ~ 2.La partie imaginaire de l'impédance correspondant auxmodes de translation, c z et c x est nettement plus é<strong>le</strong>véeque cel<strong>le</strong> correspondant aux modes de rotation. End'autres termes, l'amortissement radiatif issu de cesmodes est plus important que celui issu des modes derotation. Ce dernier est d'ail<strong>le</strong>urs pratiquement nulpour <strong>le</strong>s modes de rotation aux faib<strong>le</strong>s va<strong>le</strong>urs de a a(fondation de dimension réduite ou fréquence d'excitationbasse). Dans ce cas, <strong>le</strong> seul amortissement estapporté par l'amortissement matériel; il est doncimportant d'en tenir compte. Par contre il peut êtrenégligé devant l'amortissement radiatif pour <strong>le</strong>s modesde translation.Les résultats de la figure 4 permettent de déterminer, àtoute fréquence, <strong>le</strong> mouvement d'une fondation rigidecirculaire reposant à la surface d'un semi-espace. Il estcependant possib<strong>le</strong>, dans <strong>le</strong> cas du semi-espace, desimplifier plus avant la détermination de ce mouvementen définissant des coefficients d'impédance indépendantsde la fréquence. Ces coefficients sont choisisde façon à ce que la réponse du massif de fondationsoit aussi proche que possib<strong>le</strong> de la réponse exacte.Ainsi, la réponse étant gouvernée aux faib<strong>le</strong>s fréquencespar la raideur statique, la partie réel<strong>le</strong> de l'impédancedynamique est choisie éga<strong>le</strong> à k 1 = 1. Au voisinagede la résonance, la réponse étant contrôlée parl'amortissement du système, la partie imaginaire del'impédance est choisie de façon à reproduire <strong>le</strong> mouvementà son voisinage. En suivant cette approche,LYSMER (1965), HALL (1967) ont proposé <strong>le</strong>sva<strong>le</strong>urs d'impédance données dans <strong>le</strong> tab<strong>le</strong>au 1; cesva<strong>le</strong>urs sont indépendantes de la fréquence. Lesva<strong>le</strong>urs des raideurs statiques sont données sur lafigure 4.Les va<strong>le</strong>urs données dans <strong>le</strong> tab<strong>le</strong>au 1conduisent à unetrès bonne approximation de la réponse sur la plage defréquences définie par °~ aa ~ 4 (exception faitepeut-être du balancement). La figure 5 compare, à titred'exemp<strong>le</strong>, l'amplification (rapport du déplacementdynamique au déplacement statique) d'une fondationcirculaire, sollicitée vertica<strong>le</strong>ment, évaluée de façonexacte et avec <strong>le</strong>s coefficients d'impédance indépendantsde la fréquence.Pour mieux approcher la réponse du massif de fondationà l'aide de coefficients d'impédance indépendantsde la fréquence, certains auteurs ont proposé d'ajouterune masse fictive à la fondation (NEWMARKROSENBLUETH, 1971). Cette masse ne représentepas une masse de sol « attachée» à la fondation maisconstitue un artifice mathématique permettant demieux rendre compte de la réponse de la fondation.Notons enfin que, dans cette approche où <strong>le</strong>s coefficientsd'impédance sont pris indépendants de la fréquence,<strong>le</strong> sol de fondation est simp<strong>le</strong>ment modélisé àl'aide de ressorts et d'amortisseurs (un coup<strong>le</strong> pourchaque degré de liberté) de caractéristiques constantes.Ces simplifications sont essentiel<strong>le</strong>ment différentesd'un modè<strong>le</strong> de Wink<strong>le</strong>r; el<strong>le</strong>s correspondent à uneapproximation de l'impédance où tous <strong>le</strong>s caractèresde raideur, masse, amortissement du sol sont correctementpris en compte.~.. o 1"