Automazione e sistemi di sicurezza delle metropolitane
Automazione e sistemi di sicurezza delle metropolitane
Automazione e sistemi di sicurezza delle metropolitane

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Automazione</strong> e <strong>sistemi</strong> <strong>di</strong> <strong>sicurezza</strong> <strong>delle</strong> <strong>metropolitane</strong><br />
3.1 Generalità<br />
In un primo tempo il grado <strong>di</strong> <strong>sicurezza</strong> <strong>di</strong> un mezzo <strong>di</strong> trasporto era subor<strong>di</strong>nato<br />
all’attenzione del conduttore.<br />
Col passare degli anni e in particolar modo con lo sviluppo dell’utilizzo <strong>di</strong> energia elettrica si<br />
è passati a realizzare i primi apparati elettrici che costituivano dei <strong>sistemi</strong> <strong>di</strong> segnalamento e <strong>di</strong><br />
intervento automatico con azione <strong>di</strong> frenatura a vantaggio della <strong>sicurezza</strong>.<br />
Oggi alcune <strong>metropolitane</strong>,con l’intervento sempre più marcato dell’elettronica, possono<br />
essere ad<strong>di</strong>rittura pensate <strong>di</strong> tipo completamente automatico.<br />
3.2 Segnalamento e sezioni <strong>di</strong> blocco<br />
Con l’aumento della velocità e della frequenza dei treni e soprattutto con il conseguente<br />
aumento <strong>di</strong> incidenti,il comando “a vista” utilizzato nei primi tempi sulle <strong>metropolitane</strong> è<br />
stato integrato con <strong>sistemi</strong> <strong>di</strong> segnalamento che oggi sono alla base della <strong>sicurezza</strong> dei treni e<br />
risultano perciò in<strong>di</strong>spensabili.<br />
Le funzioni che possono essere assegnate ad un sistema <strong>di</strong> segnalamento sono principalmente<br />
<strong>di</strong> localizzazione dei treni e <strong>di</strong> protezione e controllo della marcia.<br />
Il primo passo è stato quello del <strong>di</strong>stanziamento a spazio che è alla base del sistema,ancora<br />
oggi usato,a segnalamento fisso a sezioni <strong>di</strong> blocco.<br />
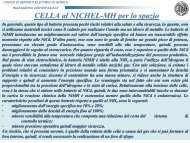
Una linea viene considerata come l’insieme <strong>di</strong> più sezioni e l’accesso a queste viene<br />
controllato tramite dei segnali <strong>di</strong> stop o <strong>di</strong> via libera.<br />
Se all’interno della sezione vi è un treno,il segnale <strong>di</strong> ingresso è rosso e in<strong>di</strong>ca così al treno<br />
successivo <strong>di</strong> fermarsi.<br />
Se invece all’interno della sezione non vi sono treni il segnale è verde e dà il via libera ai treni<br />
che sopraggiungono (figura 3.1).<br />
Fig. 3.1 – Segnalamento fisso a sezioni <strong>di</strong> blocco<br />
1
La presenza o meno <strong>di</strong> un treno all’interno della linea viene rilevata in genere tramite un<br />
circuito <strong>di</strong> binario che comanda automaticamente il segnale luminoso posto all’ingresso della<br />
sezione <strong>di</strong> blocco.<br />
Viene in pratica inviata una corrente sul binario che,se è libero,giunge ad un relè che,una<br />
volta eccitato dà il segnale luminoso <strong>di</strong> via libera (figura 3.2).<br />
Fig. 3.2 – Circuito <strong>di</strong> binario con segnalazione <strong>di</strong> via libera.<br />
Qualora invece all’interno della sezione <strong>di</strong> blocco vi sia un treno,il segnale <strong>di</strong> corrente inviato<br />
si cortocircuita sul treno stesso <strong>di</strong>seccitando così il relè che darà quin<strong>di</strong> segnale <strong>di</strong> stop (figura<br />
3.3).<br />
Fig. 3.3 – Circuito <strong>di</strong> binario con segnalazione <strong>di</strong> stop.<br />
2
Questo sistema <strong>di</strong> segnalamento risulta efficace per velocità non troppo sostenute.<br />
Quando le velocità superano,in genere, i 50 Km/h è necessario adottare <strong>sistemi</strong> <strong>di</strong><br />
segnalamento a tre segnali (verde,giallo,rosso) che consentano <strong>di</strong> avvertire anticipatamente il<br />
conducente dando tempo per la frenatura del veicolo.<br />
Il segnale giallo è posto alla fine <strong>di</strong> una sezione che ne precede un’altra bloccata (figura 3.4).<br />
Fig. 3.4 – Segnalamento a tre aspetti<br />
Resta comunque da precisare che questo tipo <strong>di</strong> sistema <strong>di</strong> segnalazione ha come grande<br />
limitazione quella <strong>di</strong> basarsi sulla vigilanza del conducente che potrebbe anche non accorgersi<br />
<strong>di</strong> un segnale <strong>di</strong> stop con il rischio evidentemente <strong>di</strong> causare un incidente con il treno che lo<br />
precede.<br />
Per scongiurare questo pericolo viene adottato un ulteriore segnale <strong>di</strong> <strong>sicurezza</strong> denominato<br />
AWS (automatc warning system) che per mezzo <strong>di</strong> un segnale acustico avvisa il conducente<br />
in cabina del tipo <strong>di</strong> segnale luminoso.<br />
Il conducente è tenuto in questo caso a premere un pulsante in segno <strong>di</strong> ricevimento del<br />
segnale. In caso contrario la frenatura del treno avviene per via automatica.<br />
3.3 ATP, ATO, ATS<br />
E’ un sistema automatico che ha come scopo principale quello <strong>di</strong> rilevamento della posizione<br />
del treno e dello stato del binario per il mantenimento della <strong>di</strong>stanza <strong>di</strong> <strong>sicurezza</strong>.<br />
Consente una protezione continua per impe<strong>di</strong>re il superamento <strong>delle</strong> velocità massime<br />
consentite in funzione <strong>delle</strong> caratteristiche del tracciato e <strong>delle</strong> con<strong>di</strong>zioni <strong>di</strong> circolazione.<br />
I più moderni <strong>sistemi</strong> ATP (automatic train protection) non presentano segnalamento al lato<br />
del binario, ma le informazioni sono trasmesse in cabina elettronicamente, in<strong>di</strong>cando la<br />
velocità limite della sezione <strong>di</strong> transito e usualmente anche <strong>di</strong> quella successiva.<br />
Nella sua forma più sofisticata è prevista una frenata d’emergenza automatica se il conducente<br />
non rispetta la velocità limite imposta.<br />
Il principio su cui si basa un sistema ATP è rappresentato in figura 3.5 dove i segnali sono da<br />
interpretare,nella maggioranza dei casi,come in<strong>di</strong>cazioni in cabina.<br />
3
Fig. 3.5 – Schema <strong>di</strong> funzionamento <strong>di</strong> un sistema ATP<br />
Il sistema associa <strong>delle</strong> bande <strong>di</strong> velocità che appaiono <strong>di</strong>etro al primo treno alle sezioni <strong>di</strong><br />
blocco.<br />
La velocità permessa nella sezione occupata dal treno è naturalmente zero, e lo è anche nel<br />
blocco seguente il treno stesso, che costituisce quin<strong>di</strong> il cosiddetto “ overlap ” dei <strong>sistemi</strong><br />
tra<strong>di</strong>zionali, ovvero lo spazio necessario per una frenata <strong>di</strong> emergenza. Se il treno attraversa il<br />
limite <strong>di</strong> questa sezione viene automaticamente fermato. Le sezioni seguenti riducono<br />
progressivamente la velocità permessa al mezzo.<br />
Il sistema ATP può essere usato in combinazione con il cosiddetto ATO (automatic train<br />
operation ) che regola lo spazio <strong>di</strong> frenatura realizzando il <strong>di</strong>agramma <strong>di</strong> trazione<br />
previsto(fermata a bersaglio).<br />
Se la marcia è svolta senza macchinista,il sistema ATO insieme all’ATP deve controllare le<br />
funzioni <strong>di</strong> apertura e chiusura <strong>delle</strong> porte in <strong>sicurezza</strong> e dare il comando <strong>di</strong> partenza dei treni<br />
dopo la verifica dell’avvenuta chiusura <strong>delle</strong> porte ed il loro successivo blocco.<br />
La presenza contemporanea dei <strong>sistemi</strong> ATP e ATO prende il nome <strong>di</strong> ATC ( automatic train<br />
control).<br />
In caso <strong>di</strong> presenza <strong>di</strong> un comando centrale del materiale rotabile,realizzato automaticamente<br />
tramite computer,si parla <strong>di</strong> ATS (automatic train supervision) i cui compiti sono:<br />
Controllo dei tempi <strong>di</strong> partenza dei treni dalle stazioni,in accordo con gli orari<br />
prestabiliti.<br />
Effettuazione del selezionamento,me<strong>di</strong>ante il posizionamento corretto degli<br />
scambi,degli itinerari e conseguentemente assegnando a ciascun treno il corretto<br />
movimento in coerenza con i vincoli dell’ATP.<br />
Controllo del movimento globale dei treni in relazione all’orario da rispettare<br />
aggiornando con continuità l’identità la posizione e la destinazione dei treni in<br />
circolazione.<br />
Intervento in tempo reale sul <strong>di</strong>agramma <strong>di</strong> trazione dei treni per l’osservanza degli<br />
orari e ricostruzione degli orari <strong>di</strong> esercizio in caso <strong>di</strong> variazione dei treni in<br />
circolazione.<br />
4
3.3.1 Limitazioni dell’ATP<br />
La previsione <strong>di</strong> un “overlap” con velocità zero <strong>di</strong>etro la sezione <strong>di</strong> blocco occupata da un<br />
treno aumenta il <strong>di</strong>stanziamento dei treni riducendo,per contro,la capacità del sistema, ossia il<br />
numero <strong>di</strong> treni per ogni ora.<br />
I <strong>sistemi</strong> ATP più moderni prevedono la trasmissione a bordo <strong>di</strong> ogni mezzo <strong>di</strong> una curva <strong>di</strong><br />
velocità che consente la verifica che il veicolo operi in ogni istante all’interno della propria<br />
curva quando il mezzo si avvicina ad una zona occupata.<br />
Un microprocessore sul mezzo riceve in<strong>di</strong>cazioni sulla sua velocità, quanto è lontano il<br />
prossimo segnale <strong>di</strong> sezione ( <strong>di</strong>stance-to-go) e sul limite <strong>di</strong> velocità della sezione seguente.<br />
Se il treno supera questo limite interviene una frenata automatica.<br />
Fig. 3.6 – Eliminazione dell’overlap tramite “<strong>di</strong>stance-to-go”<br />
La figura 3.6 mostra come questo tipo <strong>di</strong> soluzione porti all’eliminazione dell’overlap nella<br />
sezione <strong>di</strong> blocco precedente a quella sulla quale si rileva la presenza del treno.<br />
3.4 Trasmissione <strong>delle</strong> informazioni<br />
E’ evidente che in presenza <strong>di</strong> <strong>sistemi</strong> automatici complessi è in<strong>di</strong>spensabile il continuo<br />
scambio <strong>di</strong> informazioni tra terra/terreno e posto centrale.<br />
Dovrà quin<strong>di</strong> essere previsto un sistema <strong>di</strong> trasmissione <strong>delle</strong> informazioni lungo la linea e il<br />
posto centrale sufficientemente ampio, con l’utilizzo, ad esempio, <strong>di</strong> fibre ottiche.<br />
Le informazioni da trasmettere possono anche essere pensate non strettamente legate alla<br />
circolazione dei treni ma riguardanti una <strong>di</strong>agnostica più generale dello stato dei treni e degli<br />
impianti,nonché le informazioni al pubblico.<br />
5
I vari tipi <strong>di</strong> informazione possono essere classificati come segue:<br />
Informazioni <strong>di</strong> protezione: sono quelle relative allo stato e all’occupazione dei<br />
circuiti <strong>di</strong> binario,alla identità,posizione e <strong>di</strong>stanziamento dei treni e alla loro velocità.<br />
Informazioni <strong>di</strong> comando o <strong>di</strong> stato: riguardano lo stato degli enti,mobili e fissi,e<br />
della loro regolazione con ritorno in <strong>sicurezza</strong> dell’avvenuta esecuzione dei coman<strong>di</strong><br />
impartiti.<br />
Informazioni <strong>di</strong> emergenza: sono rivolte agli utenti in caso <strong>di</strong> pericoli o <strong>di</strong>sservizi.<br />
Informazioni <strong>di</strong> servizio: sono rivolte agli operatori in caso <strong>di</strong> pericolo.<br />
Informazioni <strong>di</strong> manutenzione : riguardano lo stato <strong>di</strong> servizio dei vari componenti<br />
del sistema.<br />
L’automazione può quin<strong>di</strong> riguardare tutti i settori del sistema e non solo quelli strettamente<br />
legati al controllo e alla regolazione della marcia dei veicoli e in particolare possono<br />
riguardare:<br />
Comando e controllo dell’alimentazione elettrica:consente il telecomando degli<br />
impianti e <strong>di</strong> conseguenza il non presenziamento degli stessi con<br />
monitoraggio,<strong>di</strong>agnostica e comando interruttori eseguiti a <strong>di</strong>stanza.<br />
Il comando e controllo a <strong>di</strong>stanza da parte degli impianti ausiliari che consente<br />
l’attivazione e il ripristino <strong>di</strong> meccanismi come: scale mobili,impianti <strong>di</strong><br />
ventilazione,con<strong>di</strong>zionamento.<br />
Il controllo del movimento degli utenti in termini <strong>di</strong> spostamento dei passeggeri nelle<br />
stazioni,informazioni al pubblico e situazione del servizio svolto in tempo reale.<br />
3.4.1 Modalità <strong>di</strong> trasmissione <strong>delle</strong> informazioni<br />
Per la trasmissione <strong>delle</strong> informazioni richieste al treno esistono due tipi <strong>di</strong> modalità:<br />
Trasmissione continua<br />
Trasmissione puntiforme tramite boe<br />
La trasmissione continua prevede l’utilizzo dei circuiti <strong>di</strong> binario o <strong>di</strong> apposite maglie per<br />
trasmettere informazioni al treno che vengono captate dallo stesso tramite <strong>delle</strong> bobine<br />
montate sul primo asse.<br />
Nella trasmissione puntiforme,invece,è previsto l’utilizzo <strong>di</strong> boe passive che vengono attivate<br />
al passaggio del treno trasmettendo le informazioni.<br />
Evidentemente in quest’ultimo tipo <strong>di</strong> trasmissione,per l’aggiornamento <strong>delle</strong> informazioni è<br />
necessario attendere il passaggio alla boa successiva e pertanto si ha una trasmissione che si<br />
<strong>di</strong>scosta sensibilmente da quella che è una trasmissione <strong>di</strong> informazioni in tempo reale ma che<br />
risulta vantaggiosa in termini economici e <strong>di</strong> facilità <strong>di</strong> installazione.<br />
Le figure 3.7 e 3.8 rappresentano le modalità <strong>di</strong> trasmissione <strong>delle</strong> informazioni nei due casi.<br />
6
Fig. 3.7 – Modalità continua <strong>di</strong> trasmissione <strong>delle</strong> informazioni al treno<br />
Fig. 3.8 – Modalità puntiforme <strong>di</strong> trasmissione dati al treno<br />
Un ulteriore evoluzione del sistema ATP è rappresentata dal “blocco mobile”.<br />
Il concetto su cui si basa è che in presenza <strong>di</strong> due treni che viaggiano uno <strong>di</strong>etro l’altro,alla<br />
stessa velocità e con la stessa capacità <strong>di</strong> frenata,la <strong>di</strong>stanza tra i due veicoli può essere ridotta<br />
al minimo se vi è un continuo scambio <strong>di</strong> informazioni tra i treni per cui,nel caso quello<br />
davanti freni,può farlo anche il treno che segue.<br />
Si può arrivare teoricamente ad una <strong>di</strong>stanza <strong>di</strong> 50 metri per treni che viaggiano a 50 Km/h.<br />
7
Fig. 3.9 – Rappresentazione <strong>di</strong> un sistema con “blocco mobile”<br />
Per ottenere una trasmissione <strong>delle</strong> informazioni tra i treni che sia il più veloce possibile si<br />
rende necessaria la comunicazione per via ra<strong>di</strong>o,detta TBS (Trasmission based signalling) con<br />
l’inevitabile inconveniente della possibilità <strong>di</strong> mancanza della trasmissione.<br />
Negli ultimi <strong>sistemi</strong> sono presenti comunque <strong>delle</strong> boe sul binario come riserva <strong>di</strong> <strong>sicurezza</strong>.<br />
Fig. 3.10 – Trasmission based signalling (TBS)<br />
8
3.5 Postazione centrale<br />
L’accentramento <strong>di</strong> tutti i coman<strong>di</strong> e la raccolta <strong>delle</strong> informazioni utili per l’esercizio e la<br />
manutenzione <strong>di</strong> un sistema composto da una serie <strong>di</strong> livelli <strong>di</strong> automazione sono convogliati<br />
in un’unica postazione detta PCC (Posto Centrale <strong>di</strong> Controllo).<br />
Il posto centrale,oltre ad avere una visione completa dell’esercizio dell’impianto ha la<br />
possibilità <strong>di</strong> intervenire su <strong>di</strong> esso con la regolazione me<strong>di</strong>ante segnali e <strong>di</strong>sposizioni ai treni.<br />
E’ inoltre dotato <strong>di</strong> video che consentono la telesorveglianza <strong>delle</strong> stazioni.<br />
Fig. 3.11 – Posto centrale <strong>di</strong> comando<br />
3.6 La metropolitana automatica <strong>di</strong> Torino<br />
Nel programma <strong>di</strong> miglioramento dei trasporti pubblici torinesi si è inserita la metropolitana<br />
automatica <strong>di</strong> Torino,entrata in funzione a partire dal febbraio 2006.<br />
Il percorso della prima metropolitana automatica d’Italia si sviluppa da ovest ad est<br />
collegando la città <strong>di</strong> Collegno.<br />
Il parcheggio <strong>di</strong> interscambio <strong>di</strong> Fermi, a Collegno, consente l’utilizzo dalla metro a chi a<br />
Torino arriva dalle valli montane e dalla tangenziale ovest, garantendo un collegamento con il<br />
cuore della città in poco più <strong>di</strong> 10 minuti.<br />
La metropolitana inoltre si integra con il sistema <strong>di</strong> trasporto pubblico <strong>di</strong> superficie<br />
permettendo un rapido interscambio e un elevato grado <strong>di</strong> mobilità sul territorio <strong>di</strong> Torino.<br />
La metropolitana corre sotto corso Francia - viale alberato e antica via <strong>di</strong> collegamento con la<br />
Francia - e attraversa le piazze Massaua, Rivoli e Bernini, più belle grazie alla riqualificazione<br />
avviata con la costruzione della metropolitana.<br />
9
Fig. 3.12 – Percorso della metropolitana automatica <strong>di</strong> Torino<br />
3.6.1 Il sistema integrato VAL<br />
Il sistema VAL, Veicolo Automatico Leggero, viene utilizzato per la prima volta in Italia<br />
dalla metropolitana <strong>di</strong> Torino. È stato progettato in modo da garantire la massima <strong>sicurezza</strong><br />
attraverso il sistema <strong>di</strong> Controllo Automatico dei Treni (ATC) progettato specificatamente per<br />
questo tipo <strong>di</strong> veicoli.<br />
Questo sistema beneficia <strong>delle</strong> caratteristiche più avanzate nel settore:<br />
assenza <strong>di</strong> personale fisso sui treni e in stazione che permette un esercizio ad<br />
automazione integrale;<br />
elevata capacità <strong>di</strong> gestione dei guasti;<br />
telesorveglianza e telemisurazione del servizio (treni, impianti <strong>di</strong> linea e <strong>di</strong><br />
stazione);<br />
protezione dei treni contro il rischio <strong>di</strong> collisioni, eccesso <strong>di</strong> velocità, ecc., fornita<br />
dalla funzione ATP (protezione automatica dei treni).<br />
La tecnologia VAL è il sistema <strong>di</strong> metropolitana automatica più referenziato e collaudato dal<br />
punto <strong>di</strong> vista della <strong>sicurezza</strong>, dell’affidabilità, <strong>delle</strong> prestazioni e dei costi economici.<br />
Questo sistema ha fatto la sua prima comparsa nella città francese <strong>di</strong> Lille, nel 1983, città<br />
transalpina che ha in seguito adottato il sistema VAL anche per la seconda linea della<br />
metropolitana.<br />
L’insieme del sistema è controllato per mezzo <strong>di</strong> telecoman<strong>di</strong> e telemisure dal Posto <strong>di</strong><br />
Controllo e Comando, compresi inserimento e ritiro dei treni dalla linea, con semplice<br />
comando degli operatori in servizio. In caso <strong>di</strong> necessità gli operatori del PCC <strong>di</strong>spongono <strong>di</strong><br />
<strong>sistemi</strong> <strong>di</strong> videosorveglianza e <strong>di</strong> comunicazione interfonica per informare i passeggeri. In<br />
10
assenza <strong>di</strong> un intervento degli operatori il sistema funziona in modo completamente<br />
automatico.<br />
La protezione dei treni contro il rischio <strong>di</strong> collisioni, l’eccesso <strong>di</strong> velocità, ecc. viene fornita<br />
dalla funzione ATP (Protezione Automatica dei Treni), che è parte integrante del sistema<br />
ATC sopra citato.<br />
Il sistema prevede inoltre una serie <strong>di</strong> ulteriori <strong>di</strong>spositivi <strong>di</strong> <strong>sicurezza</strong>, quali:<br />
porte automatiche <strong>di</strong> banchina nelle stazioni per evitare le cadute accidentali,<br />
simili nel funzionamento alle porte ai piani degli ascensori <strong>di</strong> qualsiasi e<strong>di</strong>ficio;<br />
passerella <strong>di</strong> emergenza facilmente accessibile agli utenti lungo tutta la linea;<br />
<strong>di</strong>spositivi <strong>di</strong> rilevamento dei fumi e protezione incen<strong>di</strong> sui treni e nelle stazioni.<br />
Fig. 3.13 – Quadro sinottico del PCC<br />
Fig. 3.14 – Monitor della sala operativa per il controllo <strong>delle</strong> vie <strong>di</strong> corsa e <strong>delle</strong> stazioni<br />
11
Le principali caratteristiche della linea metropolitana automatica VAL <strong>di</strong> Torino sono<br />
riportate nella tabella 3.15.<br />
Tab. 3.15 – Caratteristiche della linea metropolitana automatica <strong>di</strong> Torino<br />
3.6.2 I veicoli<br />
Ogni convoglio del VAL, della lunghezza <strong>di</strong> 52 metri, è composto da 2 vetture <strong>di</strong> 26 metri,<br />
formate a loro volta da 2 carrozze <strong>di</strong> 13 metri ciascuna agganciate tra loro in modo<br />
permanente. Ogni carrozza, realizzata in alluminio e leghe leggere, è larga 2,08 metri, ha<br />
un’altezza interna <strong>di</strong> circa 2 metri e pesa 14.000 kg.<br />
Su ogni fiancata si aprono tre porte e la capienza massima <strong>di</strong> ogni carrozza è <strong>di</strong> 31 passeggeri<br />
seduti e 49 in pie<strong>di</strong>, con gli strapuntini aperti; oppure 19 seduti e 61 in pie<strong>di</strong> con gli<br />
strapuntini chiusi. Complessivamente un convoglio da 52 metri può trasportare fino a 440<br />
passeggeri .<br />
12
Fig. 3.16 – Il treno VAL in esercizio<br />
Fig. 3.17 – Vista frontale del treno VAL Fig. 3.18 – Interni del treno VAL<br />
La <strong>sicurezza</strong> del VAL è aumentata inoltre dalla dotazione <strong>di</strong> ruote in gomma che scorrono su<br />
guide d’acciaio. Questo consente una maggiore aderenza in accelerazione e in frenata, una<br />
notevole riduzione <strong>delle</strong> vibrazioni e il superamento <strong>di</strong> pendenze maggiori rispetto alle<br />
normali <strong>metropolitane</strong> con ruote in ferro (pendenza massima 10%).<br />
13
APPENDICE B<br />
Il sistema <strong>di</strong> trasporto Translohr <strong>di</strong> Padova<br />
B.1 Descrizione del sistema<br />
Il sistema Translohr <strong>di</strong> Padova prevede un percorso <strong>di</strong> circa 10 km <strong>di</strong> lunghezza e prevede<br />
l’utilizzo <strong>di</strong> un veicolo su gomma a guida vincolata.<br />
Il <strong>di</strong>mensionamento del sistema si basa su una domanda <strong>di</strong> trasporto pari a 1800<br />
passeggeri/ora per <strong>di</strong>rezione.<br />
Il tracciato attraversa la città <strong>di</strong> Padova in <strong>di</strong>rezione Nord-Sud con uno sviluppo<br />
prevalentemente rettilineo <strong>di</strong> lunghezza complessiva pari a 10,3 km e via <strong>di</strong> corsa separate per<br />
le due <strong>di</strong>rezioni <strong>di</strong> marcia.<br />
I due capolinea hanno un anello <strong>di</strong> inversione <strong>di</strong> <strong>di</strong>mensione pari a circa 11 metri <strong>di</strong><br />
raggio,una piattaforma per gli arrivi e tre piattaforme destinate alla sosta dei mezzi.<br />
Fig. B.1 – Veicolo Translohr <strong>di</strong> Padova<br />
E’ prevista una sede promiscua riservata al solo trasporto pubblico per una buona parte del<br />
tracciato e,in alcuni casi,la sede risulta protetta.<br />
La sede promiscua riservata si estende per 6,425 km e nei tratti pavimentati la delimitazione<br />
<strong>delle</strong> corsie è ottenuta me<strong>di</strong>ante segnaletica orizzontale e <strong>di</strong>fferente colorazione della sede.<br />
I principali parametri <strong>di</strong> esercizio sono:<br />
Velocità commerciale stimata: 22 km/h<br />
Frequenza: 5 min<br />
Convogli utilizzati: 14<br />
La marcia è <strong>di</strong> tipo a vista ed il sistema a guida vincolata limita l’operato del conducente ai<br />
soli interventi <strong>di</strong> accelerazione,frenatura,apertura e chiusura <strong>delle</strong> porte.<br />
14
Fig. B.2 – Percorso della linea tranviaria<br />
Le fermate sono poste ad una <strong>di</strong>stanza <strong>di</strong> circa 490 metri l’una dall’altra e sono tutte <strong>di</strong><br />
lunghezza pari a 21 metri,larghezza minima <strong>di</strong> 1,5 metri e con piano del calpestio rialzato <strong>di</strong><br />
23 cm.<br />
Fig. B.3 – Fermata del Translohr<br />
15
B.2 Il sistema a guida vincolata<br />
La tecnologia adottata si basa sull’impiego <strong>di</strong> una rotaia centrale alla quale,me<strong>di</strong>ante un<br />
<strong>di</strong>spositivo posto sotto gli assi del veicolo,sono ancorate due rotelle accoppiate a “V”.<br />
Il veicolo è dotato <strong>di</strong> ruote pneumatiche che migliorano il ren<strong>di</strong>mento in termini <strong>di</strong><br />
accelerazione e frenatura e ne limitano l’impatto acustico.<br />
La rotaia centrale deve sopportare le sole forze necessarie all’orientamento degli assi mentre il<br />
peso del veicolo è sostenuto dai pneumatici.<br />
La rotaia è alta circa sette centimetri ed è alloggiata in un canale ricavato in una piccola massa<br />
<strong>di</strong> cemento armato colata nel suolo e presenta una sporgenza massima <strong>di</strong> cinque millimetri sul<br />
piano stradale.<br />
Fig. B.4 – Carrello del sistema a guida vincolata<br />
Fig B.5 – Schema <strong>di</strong> funzionamento del sistema <strong>di</strong> guida vincolata<br />
16
Le figure B.4 e B.5 mostrano quale sia il funzionamento <strong>di</strong> una rotaia a guida vincolata con<br />
assi inclinati <strong>di</strong> 45° rispetto al suolo.<br />
La rotaia è ancorata al canale <strong>di</strong> contenimento per mezzo <strong>di</strong> una resina isolante ed elastica che<br />
viene colata ed la isola elettricamente rispetto al suolo,riducendo al contempo la rumorosità<br />
dovuta alle vibrazioni.<br />
B.3 Caratteristiche del veicolo<br />
Il veicolo,a composizione modulare,è composto da casse per il trasporto passeggeri collegate<br />
a moduli <strong>di</strong> sostegno articolati e con i due assi posti alle estremità sterzanti.<br />
Fig. 8.6 – Veicolo Translohr<br />
Le caratteristiche principali dei veicoli sono riportate nella seguente tabella:<br />
LUNGHEZZA 25 m<br />
LARGHEZZA 2,2 m<br />
ALTEZZA PIATTAFORMA INTERNA 250 mm rispetto al piano d'appoggio pneumatici<br />
RAGGIO <strong>di</strong> CURVATURA MINIMO PERCORRIBILE 10,5 m<br />
VELOCITA' MASSIMA 70 Km/h<br />
CAPACITA' DI TRASPORTO 164 passeggeri (20% seduti)<br />
Tab. 8.7 – Caratteristiche dei veicoli<br />
Il veicolo è <strong>di</strong> tipo uni<strong>di</strong>rezionale dotato comunque <strong>di</strong> una cabina <strong>di</strong> guida secondaria.<br />
E’ dotato <strong>di</strong> porte su un solo lato con pre<strong>di</strong>sposizione al montaggio <strong>di</strong> porte anche sul lato<br />
opposto.<br />
Le porte sono tre con luce <strong>di</strong> 1300mm x 1950mm.<br />
Il piano è ribassato (250mm) per l’intera lunghezza del veicolo ad eccezione della cabina <strong>di</strong><br />
guida.<br />
17
La struttura <strong>di</strong> ogni veicolo è costituita dai seguenti elementi principali:<br />
Moduli <strong>di</strong> estremità:Ha la struttura portante in acciaio e una scocca contenente<br />
l’abitacolo <strong>di</strong> guida. L’estremità del telaio è dotata <strong>di</strong> un paraurti costituito da uno<br />
scudo in resina e fibra <strong>di</strong> vetro collegato al telaio me<strong>di</strong>ante tamponi <strong>di</strong> assorbimento in<br />
alluminio deformabili agli urti.<br />
Modulo passeggeri:E’ costituito da una struttura portante metallica in lega leggera che<br />
si collega all’estremità ad una articolazione del veicolo per mezzo <strong>di</strong> anelli <strong>di</strong><br />
passaggio.<br />
Anelli <strong>di</strong> passaggio:Sono costituiti <strong>di</strong> alluminio e acciaio e permettono <strong>di</strong> collegare il<br />
modulo passeggeri agli altri moduli garantendo la libera circolazione all’interno del<br />
veicolo.<br />
B.4 Trazione elettrica<br />
B.4.1 Sottostazioni <strong>di</strong> conversione<br />
Ognuna <strong>delle</strong> quattro sottostazioni viene alimentata dalla rete ENEL in me<strong>di</strong>a tensione (10/20<br />
kV c.a.) e alimenta la linea <strong>di</strong> trazione alla tensione <strong>di</strong> 750 V c.c. me<strong>di</strong>ante due alimentatori.<br />
La figura B.8 rappresenta lo schema elettrico <strong>di</strong> una SSE.<br />
Fig. B.8 – Particolare lato c.c. e alimentatori <strong>di</strong> una SSE<br />
18
Le apparecchiature ENEL sono installate in locale in<strong>di</strong>pendente ed a uso esclusivo,mentre il<br />
locale per le misure <strong>di</strong> energia,contenente le relative apparecchiature,è con accesso a doppia<br />
chiave. Tali locali sono parte integrante del fabbricato SSE.<br />
Il numero,l’inter<strong>di</strong>stanza e la potenza <strong>delle</strong> sottostazioni è tale da garantire che,in caso <strong>di</strong><br />
mancanza <strong>di</strong> fornitura da una,non venga generato alcun degrado in termini <strong>di</strong> esercizio.<br />
Le caratteristiche <strong>delle</strong> alimentazioni sono:<br />
Alimentazione primaria:<br />
Tensione nominale: 20 kV (o 10 kV)<br />
Stato del neutro: Isolato<br />
Frequenza nominale: 50 Hz<br />
Alimentazione rete <strong>di</strong> trazione:<br />
Tensione nominale: 750 V c.c.<br />
Potenza resa da ogni SSE: 1500 kW<br />
Massima corrente <strong>di</strong> guasto franco a terra lato c.c. : 22 kA<br />
Corrente <strong>di</strong> cortocircuito permanente: 13,6 kA<br />
Corrente erogabile lato c.c. : 2000 A<br />
La figura B.9 mostra lo schema elettrico della fornitura <strong>di</strong> energia alle SSE lato MT:<br />
Fig. B.9 – Particolare fornitura MT dello schema elettrico <strong>di</strong> una SSE<br />
19
L’equipaggiamento <strong>di</strong> ogni stazione è costituito dai seguenti componenti principali:<br />
Organi <strong>di</strong> manovra MT in esafloruro <strong>di</strong> zolfo<br />
Gruppi <strong>di</strong> conversione a doppio ponte in soluzione fissa con <strong>di</strong>odo <strong>di</strong> riserva<br />
Interruttori extrarapi<strong>di</strong> estraibili in scomparto blindato e interscambiabili<br />
Microprocessori per la <strong>di</strong>agnostica dell’interruttore extrarapido e per le protezioni MT<br />
Sono previsti,inoltre,<strong>di</strong>spositivi logici che permettono:<br />
Blocco generale nel caso <strong>di</strong> intervento <strong>di</strong> alcuni tipi <strong>di</strong> protezione<br />
Richiusura automatica degli extrarapi<strong>di</strong> dopo l’apertura per guasto<br />
Controllo dello stato <strong>di</strong> isolamento della linea <strong>di</strong> contatto a seguito <strong>di</strong> tre interventi <strong>di</strong><br />
blocco extrarapido<br />
Centralizzazione degli allarmi al sistema <strong>di</strong> postazione video<br />
Ogni SSE comprende un quadro MT 24 kV modulare composto da uno scomparto <strong>di</strong> arrivo<br />
della linea MT,uno scomparto <strong>di</strong> alimentazione del trasformatore <strong>di</strong> gruppo e uno scomparto<br />
misure. Il trasformatore <strong>di</strong> gruppo è <strong>di</strong> tipo a tre avvolgimenti della potenza <strong>di</strong> 1620 kVA (810<br />
kVA per ciascun secondario) con avvolgimento primario collegato a triangolo e secondari<br />
collegati uno a triangolo,l’altro a stella. Gli avvolgimenti sono isolati in resina epossi<strong>di</strong>ca e il<br />
raffreddamento è a ventilazione naturale.<br />
Per ogni SSE sarà anche prevista un’alimentazione in bassa tensione della potenza <strong>di</strong> circa 10<br />
kW che andrà ad alimentare i servizi ausiliari anche in mancanza <strong>di</strong> fornitura Mt per mezzo <strong>di</strong><br />
alimentazione <strong>di</strong> riserva.<br />
Fig. B.10 – Particolare alimentazione BT <strong>di</strong> una SSE<br />
20
B.4.2 Linea <strong>di</strong> contatto<br />
La line <strong>di</strong> contatto,alimentata alla tensione <strong>di</strong> 750 V,è realizzata con filo sagomato della<br />
sezione totale <strong>di</strong> 120 mm 2 . Questa è sostenuta per mezzo <strong>di</strong> pali e mensole oppure me<strong>di</strong>ante<br />
tiranti e funi isolate aggrappate ai fabbricati.<br />
Il conduttore <strong>di</strong> ritorno (alimentazione negativa) è costituito da dalle rotaie per mezzo <strong>di</strong> due<br />
corde da 120 mm 2 in parallelo tra rotaia pari e rotaia <strong>di</strong>spari posizionate lungo ogni tratta.<br />
I veicoli possono viaggiare con i pantografi in presa alla massima velocità <strong>di</strong> 70 km/h con<br />
pressioni statiche comprese tra 7 e 10 daN.<br />
La campata me<strong>di</strong>a è <strong>di</strong> circa 20 m e la poligonale è <strong>di</strong> ±20 cm rispetto all’asse del pantografo.<br />
Le caratteristiche tecniche della linea <strong>di</strong> contatto sono riportate nella tabella seguente:<br />
MATERIALE Cu - Etp<br />
TIPO UNI 5649<br />
SEZIONE NOMINALE 120 mmq<br />
SEZIONE TEORICA 116 mmq<br />
DIAMETRO 12,9 mm<br />
MASSA MEDIA (Kg/m) 1,031<br />
CARICO DI ROTTURA UNITARIO (daN/mmq) 36<br />
Tab. B.11 – Caratteristiche linea <strong>di</strong> contatto<br />
B.4.3 Impianto <strong>di</strong> terra<br />
L’impianto <strong>di</strong> terra è formato da due maglie: una primaria ed una secondaria.<br />
La maglia <strong>di</strong> terra primaria è realizzata con treccia in rame nudo <strong>di</strong> sezione minima pari a 70<br />
mm 2 interrata ad una profon<strong>di</strong>tà <strong>di</strong> circa un metro e interessa tutta la superficie della SSE.<br />
Il collegamento ai <strong>di</strong>spersori <strong>di</strong> terra,in acciaio ramato,è realizzato per mezzo <strong>di</strong> una corda in<br />
rame <strong>di</strong> sezione 120 mm 2 .<br />
La maglia <strong>di</strong> terra secondaria è composta da tutti i collegamenti alla maglia primaria,realizzati<br />
in corda <strong>di</strong> rame da 120 mm 2 e dall’anello <strong>di</strong> <strong>di</strong>spersione in piatto <strong>di</strong> rame che interessa<br />
l’intero perimetro della SSE.<br />
B.4.4 Cadute <strong>di</strong> tensione<br />
Per il calcolo <strong>delle</strong> cadute <strong>di</strong> tensione sulla linea sono state ipotizzate:<br />
- Distanze tra SSE pari a 1800 m<br />
- Livello <strong>di</strong> usura del conduttore <strong>di</strong> linea <strong>di</strong> contatto pari al 10%<br />
- Carico concentrato alla <strong>di</strong>stanza più sfavorevole dalle SSE<br />
Le norme CEI 9-2 impongono che la caduta <strong>di</strong> tensione sia contenuta entro il 33,3%.<br />
21
Il calcolo ha portato ai seguenti risultati:<br />
- Resistività rame : 0,0176 Ωmm 2 /m<br />
- Resistenza lineare alimentatori: 0,176 Ω/km<br />
- Lunghezza alimentatori: 0,1 km<br />
- Resistenza alimentatori: 0,00176 Ω<br />
- Sezione usurata del filo <strong>di</strong> contatto: 108 mm 2<br />
- Resistenza lineare della linea <strong>di</strong> contatto : 0,163 Ω/km<br />
- Resistenza lineare parallelo rotaie: 0,02169 Ω/km<br />
- Resistenza lineare conduttori <strong>di</strong> ritorno: 0,0735 Ω/km<br />
- Resistenza lineare totale <strong>di</strong> ritorno: 0,0167 Ω/km<br />
- Lunghezza linea: 1,8 km<br />
- Resistenza linea <strong>di</strong> contatto e ritorno: 0,323 Ω<br />
- Resistenza circuito(0,00176+0,323): 0,325 Ω<br />
Con questi valori,nell’ipotesi <strong>di</strong> allo spunto dai veicoli pari a 747 A,si è calcolata una c.d.t.<br />
per linea alimentata bilateralmente dell’or<strong>di</strong>ne <strong>di</strong> 61 V,ossia circa dell’ 8% della tensione<br />
nominale.<br />
Valore ampiamente accettabile.<br />
B.4.5 Corrente <strong>di</strong> corto circuito<br />
Nell’ipotesi <strong>di</strong> rete ideale a monte della SSE,per il calcolo della corrente <strong>di</strong> corto circuito si<br />
applica la seguente formula:<br />
Icc =_______________<br />
V20*√2*2<br />
Xc*(2+k√3)<br />
dove V20 rappresentala tensione concatenata al secondario del trasformatore,Xc la reattanza <strong>di</strong><br />
commutazione e K il rapporto <strong>di</strong> impedenza determinato in base alla seguente formula:<br />
X12-X23/2<br />
K = _____________<br />
X12<br />
con X12 = 8% e X23 = 1%, risulta: K = 0,937.<br />
La reattanza <strong>di</strong> commutazione si determina in base alla formula:<br />
X12*V20 2<br />
Xc = ________________<br />
100*P2*1000<br />
con P2 pari alla potenza del secondario del trasformatore (810 KW) si ottiene: Xc = 0,0032<br />
e quin<strong>di</strong>:<br />
Icc = 13,6 kA con valore <strong>di</strong> picco pari a 13,6*√2 = 19,23 kA<br />
22