

kart_kreiv_ir_pav_integralai.pdf
kart_kreiv_ir_pav_integralai.pdf
kart_kreiv_ir_pav_integralai.pdf

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
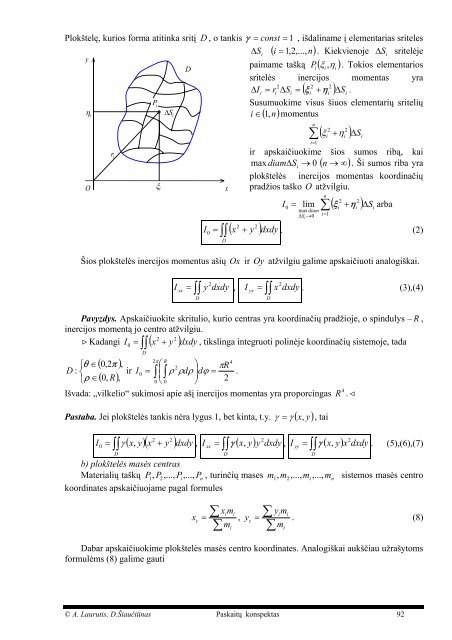
Plokštelę, kurios forma atitinka sritį D , o tankis γ = const = 1 , išdaliname į elementarias sriteles<br />
y<br />
D<br />
∆ Si<br />
( i = 1,<br />
2,...,<br />
n)<br />
. Kiekvienoje ∆ Si<br />
sritelėje<br />
paimame tašką Pi ( ξ i,<br />
ηi<br />
) . Tokios elementarios<br />
sritelės inercijos momentas yra<br />
2<br />
2 2<br />
∆Ii<br />
= ri<br />
∆Si<br />
= ( ξ i + ηi<br />
) ∆Si<br />
.<br />
Pi<br />
Susumuokime visus šiuos elementarių sritelių<br />
ηi<br />
∆Si<br />
i ∈ 1,<br />
n momentus<br />
I<br />
0<br />
2 2 ( x y )<br />
= ∫∫ +<br />
D<br />
( )<br />
2 2 ( ξ + η )<br />
© A. Laurutis, D.Šiaučiūnas Paskaitų konspektas 92<br />
n<br />
∑<br />
i=<br />
1<br />
i<br />
i<br />
∆S<br />
<strong>ir</strong> apskaičiuokime šios sumos ribą, kai<br />
max diam ∆Si → 0 ( n → ∞)<br />
. Ši sumos riba yra<br />
plokštelės inercijos momentas koordinačių<br />
pradžios taško O atžvilgiu.<br />
I<br />
2 2 ( + )<br />
n<br />
0 = lim ∑ i ηi<br />
max diam<br />
∆S<br />
→ i=<br />
1<br />
i 0<br />
i<br />
ξ ∆S<br />
arba<br />
dxdy . (2)<br />
Šios plokštelės inercijos momentus ašių Ox <strong>ir</strong> Oy atžvilgiu galime apskaičiuoti analogiškai.<br />
I xx<br />
2<br />
= ∫∫ y dxdy , I yy = ∫∫<br />
D<br />
D<br />
2<br />
x dxdy . (3),(4)<br />
Pavyzdys. Apskaičiuokite skritulio, kurio centras yra koordinačių pradžioje, o spindulys – R ,<br />
inercijos momentą jo centro atžvilgiu.<br />
2 2<br />
> Kadangi I0<br />
= ∫∫ ( x + y ) dxdy , tikslinga integruoti polinėje koordinačių sistemoje, tada<br />
( 0,<br />
2π<br />
) ,<br />
( 0,<br />
R)<br />
,<br />
D<br />
2π<br />
R<br />
4<br />
⎧θ<br />
∈<br />
⎛ ⎞ 2 πR<br />
D : ⎨ <strong>ir</strong> I0<br />
= ρ ρdρ<br />
dϕ<br />
=<br />
⎩ρ<br />
∈ ∫∫ ⎜ ⎟<br />
⎜ ⎟<br />
.<br />
2<br />
0⎝0 ⎠<br />
Išvada: „vilkelio“ sukimosi apie ašį inercijos momentas yra proporcingas<br />
Pastaba. Jei plokštelės tankis nėra lygus 1, bet kinta, t.y. γ ( x, y)<br />
I<br />
0<br />
=<br />
ri<br />
O ξi<br />
∫∫<br />
D<br />
2 2<br />
( x,<br />
y)(<br />
x + y )<br />
2<br />
γ dxdy , I = ( x,<br />
y)<br />
y dxdy<br />
b) plokštelės masės centras<br />
Materialių taškų P , P2<br />
,..., Pi<br />
,..., Pn<br />
koordinates apskaičiuojame pagal formules<br />
xx<br />
∫∫<br />
D<br />
γ = , tai<br />
∫∫<br />
γ , I = ( x,<br />
y)<br />
1 , turinčių mases m , m2,...,<br />
mi<br />
,..., mn<br />
∑<br />
∑<br />
x<br />
i<br />
∑<br />
∑<br />
yy<br />
D<br />
4<br />
R .<<br />
2<br />
γ x dxdy . (5),(6),(7)<br />
1 sistemos masės centro<br />
ximi<br />
yimi<br />
x c = , y c = . (8)<br />
m<br />
m<br />
Dabar apskaičiuokime plokštelės masės centro koordinates. Analogiškai aukščiau užrašytoms<br />
formulėms (8) galime gauti<br />
i<br />
i




