matos ramáveis - Mecatrônica Atual
matos ramáveis - Mecatrônica Atual
matos ramáveis - Mecatrônica Atual

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
automação<br />
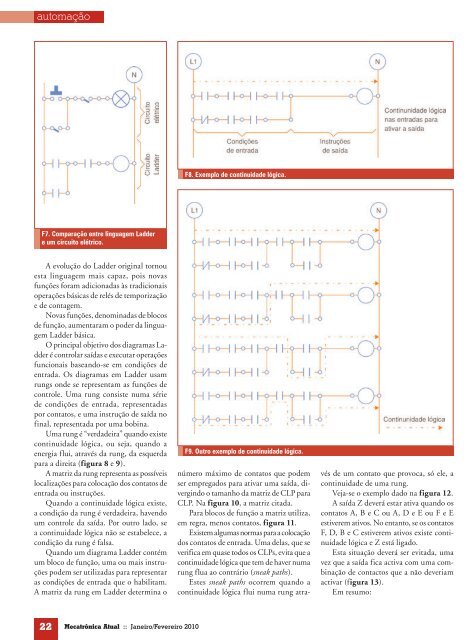
F7. Comparação entre linguagem Ladder<br />
e um circuito elétrico.<br />
A evolução do Ladder original tornou<br />
esta linguagem mais capaz, pois novas<br />
funções foram adicionadas às tradicionais<br />
operações básicas de relés de temporização<br />
e de contagem.<br />
Novas funções, denominadas de blocos<br />
de função, aumentaram o poder da linguagem<br />
Ladder básica.<br />
O principal objetivo dos diagramas Ladder<br />
é controlar saídas e executar operações<br />
funcionais baseando-se em condições de<br />
entrada. Os diagramas em Ladder usam<br />
rungs onde se representam as funções de<br />
controle. Uma rung consiste numa série<br />
de condições de entrada, representadas<br />
por contatos, e uma instrução de saída no<br />
final, representada por uma bobina.<br />
Uma rung é “verdadeira” quando existe<br />
continuidade lógica, ou seja, quando a<br />
energia flui, através da rung, da esquerda<br />
para a direita (figura 8 e 9).<br />
A matriz da rung representa as possíveis<br />
localizações para colocação dos contatos de<br />
entrada ou instruções.<br />
Quando a continuidade lógica existe,<br />
a condição da rung é verdadeira, havendo<br />
um controle da saída. Por outro lado, se<br />
a continuidade lógica não se estabelece, a<br />
condição da rung é falsa.<br />
Quando um diagrama Ladder contém<br />
um bloco de função, uma ou mais instruções<br />
podem ser utilizadas para representar<br />
as condições de entrada que o habilitam.<br />
A matriz da rung em Ladder determina o<br />
22 <strong>Mecatrônica</strong> <strong>Atual</strong> :: Janeiro/Fevereiro 2010<br />
F8. Exemplo de continuidade lógica.<br />
F9. Outro exemplo de continuidade lógica.<br />
número máximo de contatos que podem<br />
ser empregados para ativar uma saída, divergindo<br />
o tamanho da matriz de CLP para<br />
CLP. Na figura 10, a matriz citada.<br />
Para blocos de função a matriz utiliza,<br />
em regra, menos contatos, figura 11.<br />
Existem algumas normas para a colocação<br />
dos contatos de entrada. Uma delas, que se<br />
verifica em quase todos os CLPs, evita que a<br />
continuidade lógica que tem de haver numa<br />
rung flua ao contrário (sneak paths).<br />
Estes sneak paths ocorrem quando a<br />
continuidade lógica flui numa rung atra-<br />
vés de um contato que provoca, só ele, a<br />
continuidade de uma rung.<br />
Veja-se o exemplo dado na figura 12.<br />
A saída Z deverá estar ativa quando os<br />
contatos A, B e C ou A, D e E ou F e E<br />
estiverem ativos. No entanto, se os contatos<br />
F, D, B e C estiverem ativos existe continuidade<br />
lógica e Z está ligado.<br />
Esta situação deverá ser evitada, uma<br />
vez que a saída fica activa com uma combinação<br />
de contactos que a não deveriam<br />
activar (figura 13).<br />
Em resumo: