8. pÅednáška
8. pÅednáška
8. pÅednáška

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
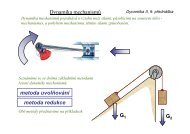
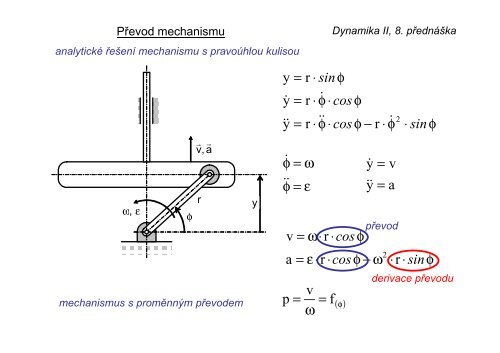
Převod mechanismu<br />
analytické řešení mechanismu s pravoúhlou kulisou<br />
Dynamika II, <strong>8.</strong> přednáška<br />
ω, ε<br />
φ<br />
v r , a<br />
r<br />
r<br />
y<br />
y = r ⋅ sinφ<br />
y&<br />
= r ⋅ φ&<br />
⋅ cos φ<br />
&& y = r ⋅&&<br />
φ ⋅ cos φ − r ⋅ φ&<br />
φ & = ω<br />
&& φ = ε<br />
v = ω⋅r<br />
⋅cos<br />
φ<br />
a<br />
y&<br />
=<br />
&& y =<br />
= ε⋅r<br />
⋅cos<br />
φ − ω<br />
v<br />
p = = f<br />
ω<br />
mechanismus s proměnným převodem ( φ)<br />
2<br />
v<br />
a<br />
převod<br />
2<br />
⋅ sinφ<br />
⋅r<br />
⋅ sinφ<br />
derivace převodu
analytické řešení řetězového převodu<br />
φ<br />
ω t ,ε t<br />
talíř<br />
φ & = ω<br />
&& φ = ε<br />
t<br />
R<br />
s = φ ⋅ R<br />
t<br />
Převod mechanismu<br />
v = ω t·R = ω k·r<br />
kolečko<br />
mechanismus s konstantním převodem<br />
ψ<br />
r<br />
ω k , ε k<br />
s = ψ ⋅r<br />
s<br />
ψ =<br />
r<br />
R<br />
ψ = φ ⋅<br />
r<br />
ψ & = ω<br />
ψ && = ε<br />
k<br />
k<br />
Dynamika II, <strong>8.</strong> přednáška<br />
R<br />
ψ = φ ⋅<br />
r<br />
R<br />
ψ & = φ⋅ &<br />
r<br />
R<br />
ωk<br />
= ωt<br />
⋅<br />
r<br />
dψ<br />
p = =<br />
dφ<br />
ω &<br />
ε<br />
k<br />
k<br />
= ω&<br />
= ε<br />
t<br />
R<br />
⋅<br />
r<br />
R<br />
⋅<br />
r<br />
t<br />
převod<br />
= ω<br />
R<br />
r<br />
= ε<br />
t<br />
⋅p<br />
= konst<br />
t<br />
⋅p
Převod mechanismu<br />
Dynamika II, <strong>8.</strong> přednáška<br />
analytické řešení řetězového převodu<br />
φ<br />
ω t ,ε t<br />
talíř<br />
R<br />
s = φ ⋅ R<br />
v = ω t·R = ω k·r<br />
Převod je konstantní,<br />
nemění se podle okamžité<br />
polohy mechanismu<br />
(např. podle sklonu pedálů).<br />
ψ<br />
kolečko<br />
r<br />
ω k , ε k<br />
Zrychlení hnaného a hnacího členu<br />
jsou ve stejném poměru (převod)<br />
jako rychlosti<br />
(toto neplatí pro mechanismy<br />
s proměnným převodem).<br />
dp<br />
q = =<br />
dφ<br />
0<br />
R<br />
ψ = φ ⋅<br />
r<br />
R<br />
ψ & = φ⋅ &<br />
r<br />
R<br />
ωk<br />
= ωt<br />
⋅<br />
r<br />
dψ<br />
p = =<br />
dφ<br />
ω &<br />
ε<br />
ε<br />
k<br />
k<br />
k<br />
= ω&<br />
= ε<br />
= ε<br />
t<br />
t<br />
R<br />
⋅<br />
r<br />
R<br />
⋅<br />
r<br />
t<br />
= ω<br />
R<br />
r<br />
= ε<br />
⋅ p + ω<br />
t<br />
⋅p<br />
= konst<br />
t<br />
2<br />
t<br />
⋅p<br />
⋅q
Mechanismy s konstantním převodem<br />
Dynamika II, <strong>8.</strong> přednáška<br />
v = ω 1·r = ω 2·R<br />
R 2<br />
1<br />
r ω 2 , ε 2<br />
ω 1 , ε 1<br />
ω<br />
ε<br />
p =<br />
2<br />
2<br />
= ε<br />
r<br />
R<br />
= ω<br />
1<br />
1<br />
⋅p<br />
⋅p<br />
hnací kolo malé<br />
hnané kolo velké<br />
převod do pomala p < 1<br />
i<br />
R<br />
r<br />
ω<br />
ω<br />
1<br />
= = i > 1<br />
2<br />
1<br />
r<br />
ω 1 , ε 1<br />
R<br />
γ<br />
s<br />
δ<br />
2<br />
ω<br />
ε<br />
p<br />
2<br />
2<br />
=<br />
r<br />
R<br />
= ω<br />
= ε<br />
1<br />
1<br />
=<br />
⋅p<br />
⋅p<br />
s<br />
s<br />
⋅<br />
⋅<br />
sin<br />
sin<br />
γ<br />
δ<br />
=<br />
sin γ<br />
sinδ<br />
ω 2 , ε 2
Mechanismy s konstantním převodem<br />
řazení převodů za sebou<br />
= ω<br />
ω 2 ω 3<br />
r 1<br />
2 1<br />
r 2 R<br />
2<br />
R 3<br />
r<br />
1 2 3<br />
1<br />
ω3<br />
= ω1<br />
⋅<br />
ω 1<br />
R<br />
2<br />
R 2<br />
ω<br />
p =<br />
12<br />
r<br />
R<br />
1<br />
2<br />
⋅<br />
r<br />
1<br />
Dynamika II, <strong>8.</strong> přednáška<br />
r2<br />
⋅<br />
R<br />
3<br />
ω<br />
3<br />
p =<br />
23<br />
= ω<br />
r<br />
2<br />
R<br />
2<br />
3<br />
⋅<br />
r<br />
R<br />
2<br />
3<br />
p =<br />
ω<br />
ε<br />
3<br />
3<br />
p<br />
12<br />
= ω<br />
= ε<br />
1<br />
⋅p<br />
1<br />
⋅p<br />
⋅p<br />
23<br />
=<br />
r<br />
R<br />
1<br />
2<br />
r2<br />
⋅<br />
R<br />
3<br />
dílčí převody se násobí
Mechanismy s konstantním převodem<br />
Dynamika II, <strong>8.</strong> přednáška<br />
v = ω 1·r = ω 2·R<br />
roztečné kružnice<br />
R 2<br />
1<br />
r ω 2 , ε 2<br />
ω 1 , ε 1<br />
1 2<br />
ω 1 ω 2<br />
1 2<br />
valení bez prokluzu s třecím převodem<br />
ozubení - mechanická zábrana prokluzu<br />
roztečné kružnice<br />
1 2<br />
r<br />
R<br />
ω 1 ω 2<br />
ω 1 ω 2
Mechanismy s konstantním převodem<br />
Dynamika II, <strong>8.</strong> přednáška<br />
ozubené soukolí<br />
mechanismus s proměnným převodem<br />
1 2<br />
p=ω 2 /ω 1<br />
φ 1<br />
p=ω 2 /ω 1<br />
φ 1<br />
ω 1 ω 2<br />
tlačený bok<br />
tlačný bok<br />
Má-li kinematická dvojice<br />
tlačný - tlačený zub<br />
tvořit mechanismus<br />
s konstantním převodem,<br />
musí mít boky zubů tvar<br />
evolventy nebo epicykloidy.<br />
ω 1 ω 2
Mechanismy s konstantním převodem<br />
předlohové soukolí<br />
planetové soukolí<br />
Dynamika II, <strong>8.</strong> přednáška<br />
ω 2<br />
r 1<br />
R 3<br />
3 1 2<br />
ω 1<br />
ω 3<br />
1<br />
R 2<br />
r 2<br />
předloha<br />
2<br />
r 2<br />
ω 1<br />
r 3<br />
3<br />
1<br />
r 1<br />
ω 3<br />
R<br />
2<br />
korunové kolo<br />
satelit<br />
unašeč<br />
3<br />
ω 1 ω 3<br />
1 pastorek<br />
2<br />
p<br />
ω<br />
ε<br />
=<br />
3<br />
3<br />
p<br />
3<br />
12<br />
= ω<br />
= ε<br />
1<br />
p<br />
⋅p<br />
1<br />
⋅p<br />
⋅p<br />
=<br />
23<br />
1<br />
2<br />
⋅<br />
=<br />
r<br />
r<br />
R<br />
1<br />
2<br />
r2<br />
⋅<br />
R<br />
3<br />
r<br />
3<br />
= r1<br />
+ r2<br />
R = r + 2⋅<br />
1<br />
r1<br />
+ r<br />
2<br />
1<br />
r 2<br />
=<br />
r1<br />
R + r<br />
1<br />
S<br />
A<br />
π<br />
v r<br />
S<br />
v r<br />
A<br />
p<br />
=<br />
ω<br />
v<br />
3<br />
A<br />
ω<br />
ω<br />
ω<br />
3<br />
1<br />
1<br />
vS<br />
=<br />
r3<br />
= 2 ⋅ v<br />
vA<br />
=<br />
r<br />
=<br />
v<br />
r<br />
3<br />
1<br />
S<br />
S<br />
r<br />
⋅<br />
v<br />
1<br />
A<br />
=<br />
r1<br />
2⋅r<br />
3
Mechanismy s konstantním převodem<br />
planetové soukolí<br />
Dynamika II, <strong>8.</strong> přednáška<br />
2<br />
r 2<br />
3<br />
ω 3<br />
2<br />
korunové kolo<br />
satelit<br />
unašeč<br />
3<br />
ω 1<br />
r 3<br />
1<br />
r 1<br />
R<br />
ω 1 ω 3<br />
1 pastorek<br />
S<br />
A<br />
π<br />
v r<br />
S<br />
v r<br />
A<br />
p<br />
=<br />
ω<br />
v<br />
3<br />
A<br />
ω<br />
ω<br />
ω<br />
3<br />
1<br />
1<br />
vS<br />
=<br />
r3<br />
= 2 ⋅ v<br />
vA<br />
=<br />
r<br />
=<br />
v<br />
r<br />
3<br />
1<br />
S<br />
S<br />
r<br />
⋅<br />
v<br />
1<br />
A<br />
=<br />
r1<br />
2⋅r<br />
3
Mechanismy s konstantním převodem<br />
kladkostroje<br />
Dynamika II, <strong>8.</strong> přednáška<br />
v l =2·v<br />
v l =2·v<br />
v l =4·v<br />
π<br />
v<br />
2·v 2·v<br />
v,a<br />
v<br />
a<br />
l<br />
l<br />
=<br />
=<br />
2 ⋅ v<br />
2⋅a<br />
2·v<br />
π<br />
v<br />
4·v<br />
v,a<br />
v<br />
a<br />
l<br />
l<br />
=<br />
=<br />
4⋅<br />
v<br />
4⋅a<br />
r/3<br />
r
Mechanismy s konstantním převodem<br />
variátory<br />
Dynamika II, <strong>8.</strong> přednáška<br />
p =<br />
ω<br />
ε<br />
ε<br />
ω<br />
ω<br />
výstupní<br />
výstupní<br />
výstupní<br />
výstupní<br />
vstupní<br />
= ω<br />
= ε<br />
dp<br />
q = = 0<br />
dφ<br />
= ε<br />
vstupní<br />
= konst<br />
vstupní<br />
vstupní<br />
⋅ p<br />
⋅p<br />
+ ω<br />
⋅ p<br />
2<br />
vstupní<br />
⋅q
Mechanismy s proměnným převodem<br />
analytické řešení<br />
s u 1<br />
mechanismus<br />
mechanismus jako<br />
„geometrický převodník“<br />
u 2<br />
u 3<br />
mechanismus s 1 stupněm volnosti<br />
1. úloha polohy<br />
u = f ( s)<br />
Dynamika II, <strong>8.</strong> přednáška<br />
zdvihová závislost<br />
2. řešení rychlosti<br />
zobecnělá souřadnice<br />
délková nebo úhlová<br />
s - souřadnice hnacího členu<br />
- vstupní souřadnice<br />
- „souřadnice mechanismu“<br />
souřadnic mechanismu<br />
je tolik, kolik stupňů<br />
volnosti mechanismus má<br />
u - souřadnice hnaného členu<br />
- výstupní souřadnice<br />
výstupních souřadnic<br />
může být libovolný počet<br />
v<br />
výst<br />
du<br />
ds<br />
v<br />
ds<br />
dt<br />
( s)<br />
( t )<br />
výst<br />
=<br />
=<br />
=<br />
du<br />
=<br />
v<br />
p<br />
du<br />
ds<br />
( s( t )) ( s) ( t )<br />
dt<br />
p<br />
( s)<br />
vst<br />
⋅ v<br />
=<br />
( s) vst<br />
ds<br />
zobecnělá rychlost<br />
⋅<br />
převod<br />
dt
Mechanismy s proměnným převodem<br />
analytické řešení<br />
s u 1<br />
mechanismus<br />
mechanismus jako<br />
„geometrický převodník“<br />
u 2<br />
u 3<br />
mechanismus s 1 stupněm volnosti<br />
1. úloha polohy<br />
u =<br />
f ( s)<br />
Dynamika II, <strong>8.</strong> přednáška<br />
zdvihová závislost<br />
2. řešení rychlosti<br />
3. řešení zrychlení<br />
a<br />
výst<br />
=<br />
dv<br />
výst<br />
dt<br />
=<br />
d<br />
( p ) ( s)<br />
⋅ vvst<br />
dp( s)<br />
dt<br />
=<br />
dt<br />
⋅ v<br />
vst<br />
+<br />
p<br />
( s)<br />
⋅<br />
dv<br />
dt<br />
vst<br />
a<br />
výst<br />
=<br />
dp<br />
ds<br />
( s)<br />
⋅<br />
ds<br />
dt<br />
⋅ v<br />
vst<br />
+<br />
p<br />
( s)<br />
⋅<br />
dv<br />
dt<br />
vst<br />
dp<br />
ds<br />
( s)<br />
=<br />
q<br />
( s)<br />
derivace převodu<br />
a<br />
výst<br />
=<br />
p<br />
⋅a<br />
+ q<br />
( s) vst ( s)<br />
zobecnělé zrychlení<br />
⋅ v<br />
2<br />
vst<br />
ds =<br />
dt<br />
v vst<br />
dv<br />
dt<br />
vst<br />
=<br />
a<br />
vst
Mechanismy s proměnným převodem<br />
analytické řešení<br />
s u 1<br />
mechanismus<br />
mechanismus jako<br />
„geometrický převodník“<br />
3. řešení zrychlení<br />
u 2<br />
u 3<br />
mechanismus s 1 stupněm volnosti<br />
1. úloha polohy<br />
u =<br />
f ( s)<br />
zdvihová závislost<br />
2. řešení rychlosti<br />
v<br />
výst<br />
=<br />
Dynamika II, <strong>8.</strong> přednáška<br />
p<br />
⋅ v<br />
( s) vst<br />
a<br />
výst<br />
=<br />
p<br />
⋅a<br />
+ q<br />
( s) vst ( s)<br />
⋅ v<br />
2<br />
vst<br />
převodové funkce<br />
u =<br />
f ( s)<br />
zdvihová závislost<br />
du<br />
ds<br />
( s)<br />
= p převod<br />
( s)<br />
dp<br />
ds<br />
( s)<br />
= q ( s)<br />
derivace převodu
Mechanismy s proměnným převodem<br />
analytické řešení<br />
r u 1<br />
mechanismus<br />
s<br />
mechanismus jako<br />
„geometrický převodník“<br />
3. řešení zrychlení<br />
a<br />
q11<br />
q12<br />
výst<br />
=<br />
+<br />
a<br />
v<br />
vst1<br />
2<br />
vst1<br />
+ 2⋅<br />
v<br />
⋅p1<br />
+ a<br />
⋅q11<br />
+<br />
vst1<br />
⋅ v<br />
vst2<br />
vst2<br />
v<br />
⋅q12<br />
u 2<br />
u 3<br />
⋅p2<br />
+<br />
2<br />
vst2<br />
( r , s)<br />
( r , s)<br />
= q22( r,<br />
s)<br />
( r,<br />
s)<br />
=<br />
∂p1<br />
∂r<br />
∂p1<br />
∂s<br />
( r , s) ( r , s)<br />
=<br />
∂p2<br />
∂r<br />
⋅q22<br />
+<br />
=<br />
∂p2<br />
∂s<br />
( r , s)<br />
mechanismus se 2 stupni volnosti<br />
1. úloha polohy<br />
du<br />
v výst<br />
u = f<br />
,<br />
=<br />
=<br />
∂u<br />
( r s)<br />
∂u<br />
( r,<br />
s) ( r , s)<br />
∂r<br />
du<br />
dt<br />
⋅ dr +<br />
∂u<br />
= ⋅<br />
∂r<br />
dr<br />
dt<br />
∂s<br />
⋅ ds<br />
∂u<br />
+ ⋅<br />
∂s<br />
ds<br />
dt<br />
v<br />
výst<br />
= vvst1<br />
⋅ p1<br />
,<br />
+ v ⋅ p2<br />
,<br />
p1<br />
∂u<br />
( r,<br />
s)<br />
( r , s)<br />
= p2( r,<br />
s)<br />
∂r<br />
zdvihová závislost<br />
2. řešení rychlosti<br />
totální diferenciál<br />
Dynamika II, <strong>8.</strong> přednáška<br />
( r s) vst2 ( r s)<br />
=<br />
∂u<br />
( r,<br />
s)<br />
∂s
Mechanismy s proměnným převodem<br />
analytické řešení<br />
trigonometrická metoda<br />
Trigonometrická metoda<br />
spočívá v intuitivním použití<br />
rozličných geometrických zákonitostí,<br />
aplikovaných na geometrii mechanismu.<br />
mechanismus s 1 stupněm volnosti<br />
1. úloha polohy<br />
u = f ( s)<br />
Dynamika II, <strong>8.</strong> přednáška<br />
ω 32 , ε 32<br />
zdvihová závislost<br />
r<br />
φ<br />
b<br />
2<br />
3<br />
4<br />
x<br />
1<br />
v,<br />
a<br />
r<br />
r φ<br />
x<br />
2<br />
2 2<br />
= r + b − 2 ⋅ r ⋅ b ⋅ cos<br />
x<br />
2 2<br />
( φ) = r + b − 2 ⋅ r ⋅ b ⋅ cos φ
Mechanismy s proměnným převodem<br />
analytické řešení<br />
vektorová metoda<br />
Vektorová metoda<br />
spočívá v nahrazení kinematického schématu<br />
řetězcem vektorů, tvořících uzavřený vektorový obrazec.<br />
Rovnice, vyjadřující uzavřenost vektorového obrazce,<br />
pak slouží k sestavení rovnic řešení úlohy polohy.<br />
mechanismus s 1 stupněm volnosti<br />
1. úloha polohy<br />
u = f ( s)<br />
Dynamika II, <strong>8.</strong> přednáška<br />
r<br />
i<br />
φ i<br />
zdvihová závislost<br />
φ n r<br />
n<br />
r 1<br />
φ 1<br />
r<br />
2<br />
φ2<br />
Kinematické schéma - řetězec členů<br />
r<br />
1<br />
n<br />
r r r r<br />
+ 2<br />
+ K+<br />
i<br />
+ K+<br />
n<br />
= ∑<br />
i<br />
i=<br />
1<br />
=<br />
r<br />
0<br />
Uzavřený vektorový obrazec<br />
n<br />
∑<br />
i=<br />
1<br />
r<br />
i<br />
⋅ cos φ<br />
i<br />
= 0<br />
n<br />
∑<br />
i=<br />
1<br />
r<br />
i<br />
⋅<br />
sin φ<br />
i<br />
=<br />
0
H<br />
Mechanismy s proměnným převodem<br />
analytické řešení<br />
vektorová metoda<br />
1<br />
A<br />
C<br />
2 r<br />
ω 2 ,ε 2<br />
ψ<br />
4<br />
φ<br />
r<br />
v<br />
ω 4 , ε 4<br />
r<br />
3<br />
ω 3 , ε 3<br />
r<br />
,<br />
34<br />
a 34<br />
r<br />
+ z<br />
r ⋅ sinφ −<br />
r ⋅ cos φ −<br />
B<br />
r<br />
+ H<br />
z<br />
r<br />
= 0<br />
z ⋅ sinψ =<br />
z ⋅ cos ψ +<br />
0<br />
H<br />
H r<br />
=<br />
ψ<br />
0<br />
φ<br />
r<br />
z r<br />
mechanismus s 1 stupněm volnosti<br />
1. úloha polohy<br />
tan ψ =<br />
ψ =<br />
u = f ( s)<br />
arctan<br />
ω<br />
ε<br />
4<br />
4<br />
Dynamika II, <strong>8.</strong> přednáška<br />
r ⋅ sin φ<br />
H + r ⋅ cos φ<br />
= p⋅ε<br />
zdvihová závislost<br />
r ⋅ sin φ<br />
H + r ⋅ cos φ<br />
= p⋅ω<br />
p<br />
q<br />
2<br />
2<br />
+ q ⋅ω<br />
( φ)<br />
( φ)<br />
=<br />
=<br />
dp<br />
2<br />
2<br />
dψ<br />
dφ<br />
( φ)<br />
dφ<br />
d<br />
2<br />
ψ<br />
( φ) ( φ)<br />
=<br />
dφ<br />
2
H<br />
Mechanismy s proměnným převodem<br />
analytické řešení<br />
vektorová metoda<br />
1<br />
A<br />
C<br />
2 r<br />
ω 2 ,ε 2<br />
ψ<br />
4<br />
φ<br />
r<br />
v<br />
ω 4 , ε 4<br />
r<br />
3<br />
ω 3 , ε 3<br />
r<br />
,<br />
34<br />
a 34<br />
r<br />
+ z<br />
r ⋅ sinφ −<br />
r ⋅ cos φ −<br />
B<br />
r<br />
+ H<br />
z<br />
r<br />
= 0<br />
z ⋅ sinψ =<br />
z ⋅ cos ψ +<br />
0<br />
H<br />
H r<br />
=<br />
ψ<br />
0<br />
φ<br />
r<br />
z r<br />
mechanismus s 1 stupněm volnosti<br />
1. úloha polohy<br />
u = f ( s)<br />
zdvihová závislost<br />
r ⋅ φ&<br />
⋅ cos φ − z&<br />
⋅ sin ψ − z ⋅ ψ&<br />
⋅ cos ψ = 0<br />
− r ⋅ φ&<br />
⋅ sin φ − z&<br />
⋅ cos ψ + z ⋅ ψ&<br />
⋅ sin ψ = 0<br />
φ & = ω 2<br />
= ω4<br />
r ⋅φ⋅ && cosφ − r ⋅φ&<br />
2<br />
z & =<br />
v<br />
ψ&<br />
34<br />
⋅ sin φ −&&<br />
z ⋅ sin ψ −<br />
2<br />
− 2⋅z&<br />
⋅ψ&<br />
⋅cos<br />
ψ − z ⋅ψ&&<br />
⋅cos<br />
ψ + z ⋅ψ&<br />
⋅ sin ψ = 0<br />
2<br />
− r ⋅φ⋅ && sin φ − r ⋅φ&<br />
⋅cos<br />
φ −&&<br />
z ⋅cos<br />
ψ +<br />
+ 2⋅z&<br />
⋅ψ&<br />
⋅ sin ψ + z ⋅ψ&&<br />
⋅ sin ψ + z ⋅ψ&<br />
& φ = ε 2<br />
ψ& = ε<br />
4<br />
Dynamika II, <strong>8.</strong> přednáška<br />
2<br />
⋅cos<br />
ψ = 0<br />
& && z = a<br />
34
Mechanismy s proměnným převodem<br />
řešení rychlostí pólovou konstrukcí<br />
dáno : ω 2<br />
vypočtěte : ω 4<br />
π<br />
ω 3<br />
Dynamika II, <strong>8.</strong> přednáška<br />
π<br />
n B n C<br />
ω 4 =?<br />
A<br />
ω 2<br />
v r<br />
B<br />
2<br />
B<br />
3<br />
v r<br />
C<br />
C<br />
4<br />
v r<br />
B<br />
B<br />
3<br />
v r<br />
C<br />
C<br />
1<br />
vB<br />
= ω2<br />
ω<br />
4<br />
vC<br />
=<br />
CD<br />
⋅ AB<br />
= ω<br />
2<br />
⋅<br />
AB<br />
⋅<br />
Bπ<br />
Cπ<br />
CD<br />
D<br />
1<br />
ω<br />
v<br />
C<br />
3<br />
=<br />
= ω<br />
v B<br />
Bπ<br />
3<br />
⋅Cπ =<br />
v<br />
B<br />
⋅<br />
Cπ<br />
Bπ
Mechanismy s proměnným převodem<br />
řešení rychlostí pólovou konstrukcí<br />
AB⋅<br />
cos φ +<br />
AB⋅<br />
sin φ −<br />
A<br />
1<br />
φ<br />
2<br />
B<br />
BC ⋅ cos γ<br />
BC ⋅ sin γ<br />
γ<br />
3<br />
AD S<br />
AD V<br />
+ CD ⋅ cos ψ = AD<br />
− CD ⋅ sinψ = −AD<br />
C<br />
4<br />
ψ<br />
D<br />
sin<br />
=<br />
v<br />
s<br />
BC<br />
180<br />
B<br />
φ+γ<br />
π<br />
180º-(φ+ψ)<br />
ψ-γ<br />
C<br />
[ ° − ( φ + ψ)<br />
] sin( φ + ψ)<br />
Bπ<br />
sin<br />
=<br />
=<br />
Cπ<br />
( ψ − γ) sin( φ + γ)<br />
sin<br />
Bπ = BC ⋅<br />
sin<br />
Dynamika II, <strong>8.</strong> přednáška<br />
( ψ − γ)<br />
( φ + ψ)<br />
BC<br />
sin<br />
Cπ = BC ⋅<br />
sin<br />
=<br />
( φ + γ)<br />
( φ + ψ)
Mechanismy s proměnným převodem<br />
řešení rychlostí pólovou konstrukcí<br />
Dynamika II, <strong>8.</strong> přednáška<br />
B<br />
A<br />
2<br />
ω 2<br />
v r B<br />
A<br />
n A<br />
3<br />
1<br />
π<br />
n C<br />
π<br />
4<br />
n<br />
•<br />
D<br />
C<br />
n B<br />
D<br />
v r D<br />
B<br />
v r B<br />
v r<br />
A<br />
n B
Mechanismy s proměnným převodem<br />
řešení rozkladem pohybu<br />
dáno : vypočti : r r<br />
ω 2 ,ε 2<br />
B<br />
v<br />
3 C<br />
1<br />
A<br />
2<br />
C<br />
, a<br />
C<br />
4<br />
r<br />
a<br />
Ct<br />
+<br />
r<br />
v<br />
r<br />
a<br />
r<br />
a<br />
základní konstrukce<br />
C<br />
C<br />
Cn<br />
r<br />
= v<br />
r<br />
= a<br />
r<br />
= a<br />
Dynamika II, <strong>8.</strong> přednáška<br />
B<br />
B<br />
Bt<br />
r<br />
+ v<br />
r<br />
+ a<br />
r<br />
+ a<br />
CB<br />
CB<br />
Bn<br />
r<br />
+ a<br />
CBt<br />
r<br />
+ a<br />
CBn<br />
výsledný pohyb<br />
obecný rovinný<br />
=<br />
unášivý pohyb<br />
posuvný<br />
+<br />
relativní pohyb<br />
rotační<br />
A<br />
B<br />
C<br />
=<br />
A<br />
B<br />
C<br />
+<br />
B<br />
C<br />
v r<br />
CB<br />
┴BC<br />
┴AB<br />
v r B<br />
v r<br />
C<br />
a<br />
a<br />
Bn<br />
=<br />
CBn<br />
=<br />
2<br />
vB<br />
AB<br />
v<br />
2<br />
CB<br />
BC<br />
║BC<br />
║AB a r Bn<br />
a r ┴BC<br />
CBn<br />
a r<br />
CBt<br />
a r<br />
C<br />
┴AB<br />
a r<br />
Bt
Mechanismy s proměnným převodem<br />
řešení rozkladem pohybu<br />
dáno : vypočti : r r<br />
ω 2 ,ε 2<br />
B<br />
v<br />
3 C<br />
1<br />
A<br />
2<br />
B<br />
ψ<br />
φ<br />
A<br />
C<br />
, a<br />
a<br />
C<br />
C<br />
C<br />
= a<br />
0 = a<br />
Bt<br />
Bt<br />
4<br />
⋅ sin φ + a<br />
⋅ cos φ − a<br />
r<br />
a<br />
Bn<br />
Bn<br />
Ct<br />
r<br />
v<br />
r<br />
a<br />
r<br />
+ a<br />
v<br />
C<br />
0 =<br />
základní konstrukce<br />
C<br />
C<br />
Cn<br />
=<br />
v<br />
v<br />
B<br />
⋅ sinφ − a<br />
r<br />
= v<br />
r<br />
= a<br />
r<br />
= a<br />
B<br />
⋅ cos φ − a<br />
B<br />
B<br />
Bt<br />
r<br />
+ v<br />
r<br />
+ a<br />
r<br />
+ a<br />
CB<br />
CB<br />
Bn<br />
⋅ sin φ − v<br />
⋅ cos φ − v<br />
CBt<br />
Dynamika II, <strong>8.</strong> přednáška<br />
CBt<br />
r<br />
+ a<br />
CB<br />
CB<br />
⋅ sinψ + a<br />
⋅ cos ψ − a<br />
CBt<br />
r<br />
+ a<br />
⋅ sinψ<br />
⋅ cos ψ<br />
CBn<br />
CBn<br />
CBn<br />
⋅ cos ψ<br />
⋅ sin ψ<br />
φ<br />
ψ<br />
v r<br />
CB<br />
v<br />
2<br />
v r B<br />
φ<br />
a<br />
a r a r Bn<br />
=<br />
Bn<br />
B<br />
Bt<br />
AB 2<br />
φ<br />
v<br />
ψ a r a r<br />
CB<br />
CBt<br />
φ<br />
v r a<br />
CBn<br />
CBn<br />
=<br />
BC<br />
ψ<br />
C<br />
a r<br />
C
Mechanismy s proměnným převodem<br />
řešení rozkladem pohybu<br />
2<br />
A<br />
A<br />
B<br />
3<br />
4<br />
r<br />
v<br />
r<br />
B,<br />
a r<br />
v<br />
Bt<br />
ω 2 ,ε 2 C<br />
D<br />
dáno : vypočti :<br />
C<br />
r<br />
, a<br />
Ct<br />
A<br />
Coriolisova konstrukce<br />
vB<br />
= ω2<br />
B<br />
Dynamika II, <strong>8.</strong> přednáška<br />
⋅ AB<br />
C<br />
D<br />
1<br />
4 : 1<br />
=<br />
a Bn<br />
B<br />
φ ω 2 ,ε 2<br />
A<br />
r<br />
v<br />
v<br />
v<br />
B<br />
B<br />
B<br />
r<br />
= v<br />
41<br />
ψ v34,<br />
a34<br />
r<br />
v ,<br />
r<br />
B<br />
a Bt<br />
r<br />
+ v<br />
34<br />
⋅ sinφ = −v<br />
⋅cos<br />
φ = v<br />
41<br />
41<br />
δ<br />
r<br />
r<br />
ω 41 ,ε 41<br />
C<br />
D<br />
⋅ sin δ + v<br />
⋅cos<br />
δ + v<br />
┴BD<br />
v r φ<br />
41<br />
δ<br />
34<br />
34<br />
B<br />
⋅cos<br />
ψ<br />
⋅ sinψ<br />
v r<br />
┴AB<br />
v r<br />
34<br />
B<br />
ψ<br />
║BC<br />
3 : 4<br />
B<br />
B<br />
+<br />
D<br />
D<br />
ω 41 =<br />
C<br />
v 41<br />
BD<br />
C
Mechanismy s proměnným převodem<br />
Dynamika II, <strong>8.</strong> přednáška<br />
A<br />
řešení rozkladem pohybu<br />
B<br />
3<br />
4<br />
2<br />
v<br />
r<br />
B,<br />
a r<br />
Bt<br />
ω 2 ,ε 2<br />
A<br />
D<br />
r r<br />
v , a<br />
C<br />
C<br />
Ct<br />
A<br />
Coriolisova konstrukce<br />
= ⋅ AB<br />
= ε ⋅AB<br />
vB<br />
ω2<br />
B<br />
a<br />
Bt 2<br />
a<br />
Bn<br />
= ω<br />
2<br />
2<br />
⋅AB<br />
C<br />
D<br />
a<br />
A<br />
= a<br />
a<br />
Bt<br />
Bn<br />
= a<br />
r<br />
a<br />
φ<br />
Bn<br />
a Bn<br />
r<br />
a<br />
r<br />
+ a<br />
B<br />
ω 2 ,ε 2<br />
B<br />
Bt<br />
⋅ sin φ − a<br />
41n<br />
⋅ sin φ + a<br />
41n<br />
v ,<br />
r<br />
B<br />
a Bt<br />
r<br />
= a<br />
r<br />
= a<br />
Bn<br />
⋅cos<br />
δ − a<br />
41<br />
1<br />
ψ v34,<br />
a34<br />
r<br />
Bt<br />
⋅ sin δ + a<br />
41n<br />
r<br />
+ a<br />
r<br />
+ a<br />
34<br />
⋅cos<br />
φ =<br />
41t<br />
⋅cos<br />
φ =<br />
41t<br />
δ<br />
r<br />
+ a<br />
r<br />
+ a<br />
41t<br />
⋅ sin δ + a<br />
⋅cos<br />
δ + a<br />
r<br />
Cor<br />
34<br />
34<br />
r<br />
ω 41 ,ε 41<br />
34<br />
r<br />
+ a<br />
Cor<br />
D<br />
⋅cos<br />
ψ + a<br />
⋅ sin ψ + a<br />
║AB<br />
Cor<br />
Cor<br />
C<br />
φ<br />
B<br />
φ<br />
a r<br />
Bn<br />
a r Bt<br />
┴AB<br />
⋅ sin ψ<br />
a 41t<br />
┴BD<br />
⋅cos<br />
ψ<br />
a r<br />
a r 34<br />
41n<br />
ψ<br />
δ<br />
δ<br />
a r<br />
Cor<br />
4 : 1<br />
B<br />
┴BC<br />
║BC<br />
B<br />
║BD<br />
3 : 4<br />
a<br />
Cor<br />
=<br />
=<br />
2<br />
a<br />
+<br />
⋅ ω<br />
2<br />
2<br />
41n<br />
= = ω41<br />
⋅<br />
41<br />
⋅ v<br />
34<br />
v41<br />
BD<br />
D<br />
D<br />
ω = 41<br />
ε 41 =<br />
BD<br />
C<br />
v 41<br />
BD<br />
a 41t<br />
BD<br />
C
Mechanismy s proměnným převodem<br />
Dynamika II, <strong>8.</strong> přednáška<br />
A<br />
řešení rozkladem pohybu<br />
B<br />
3<br />
4<br />
2<br />
v<br />
r<br />
B,<br />
a r<br />
Bt<br />
ω 2 ,ε 2<br />
A<br />
D<br />
r r<br />
v , a<br />
C<br />
C<br />
Ct<br />
A<br />
Coriolisova konstrukce<br />
= ⋅ AB<br />
= ε ⋅AB<br />
vB<br />
ω2<br />
B<br />
a<br />
Bt 2<br />
a<br />
Bn<br />
= ω<br />
2<br />
2<br />
⋅AB<br />
C<br />
D<br />
r<br />
v<br />
C<br />
r<br />
= v<br />
41<br />
v<br />
41<br />
= ω41<br />
⋅<br />
v<br />
v<br />
Cx<br />
Cy<br />
= v<br />
= v<br />
34<br />
41<br />
r<br />
+ v<br />
34<br />
CD<br />
1<br />
⋅cos<br />
ψ − v<br />
⋅cos<br />
γ − v<br />
34<br />
41<br />
r<br />
r<br />
ψ v34,<br />
a34<br />
ω 41 ,ε 41<br />
D<br />
r r<br />
v ,<br />
a r<br />
41<br />
a 41t<br />
41n<br />
γ<br />
C<br />
a r<br />
Cor<br />
v r<br />
34<br />
┴CD<br />
v r v r 41<br />
C<br />
⋅ sin γ γ<br />
⋅ sin ψ<br />
C<br />
ν<br />
v r<br />
ψ ║BC<br />
v r<br />
Cx<br />
Cy<br />
4 : 1<br />
B<br />
B<br />
3 : 4<br />
a<br />
Cor<br />
=<br />
=<br />
2<br />
a<br />
+<br />
⋅ ω<br />
2<br />
2<br />
41n<br />
= = ω41<br />
⋅<br />
41<br />
⋅ v<br />
34<br />
v41<br />
BD<br />
D<br />
D<br />
ω = 41<br />
ε 41 =<br />
BD<br />
C<br />
v 41<br />
BD<br />
a 41t<br />
BD<br />
C
Mechanismy s proměnným převodem<br />
Dynamika II, <strong>8.</strong> přednáška<br />
A<br />
řešení rozkladem pohybu<br />
B<br />
3<br />
4<br />
2<br />
v<br />
r<br />
B,<br />
a r<br />
Bt<br />
ω 2 ,ε 2<br />
A<br />
D<br />
r r<br />
v , a<br />
C<br />
C<br />
Ct<br />
A<br />
Coriolisova konstrukce<br />
= ω ⋅ AB<br />
= ε ⋅AB<br />
vB<br />
2<br />
B<br />
a<br />
Bt 2<br />
a<br />
Bn<br />
= ω<br />
2<br />
2<br />
⋅AB<br />
C<br />
D<br />
r<br />
a<br />
r<br />
a<br />
C<br />
r<br />
= a<br />
r<br />
= a<br />
41<br />
r<br />
+ a<br />
r<br />
+ a<br />
C 41n<br />
a<br />
41t<br />
= ε41<br />
⋅<br />
2<br />
a<br />
41n<br />
= ω41<br />
⋅<br />
a<br />
a<br />
Cx<br />
Cy<br />
= a<br />
= a<br />
34<br />
41t<br />
34<br />
1<br />
r<br />
+ a<br />
r<br />
+ a<br />
41t<br />
CD<br />
CD<br />
Cor<br />
⋅cos<br />
ψ − a<br />
⋅cos<br />
γ − a<br />
34<br />
41n<br />
41n<br />
r<br />
r<br />
ψ v34,<br />
a34<br />
r<br />
+ a<br />
ω 41 ,ε 41<br />
Cor<br />
a r<br />
41t<br />
┴CD<br />
⋅cos<br />
γ − a<br />
⋅ sin γ − a<br />
41t<br />
34<br />
γ<br />
D<br />
r r<br />
v ,<br />
a r<br />
41<br />
a 41t<br />
41n<br />
γ<br />
a r 34<br />
a r<br />
γ<br />
41n<br />
C<br />
║CD<br />
⋅ sin γ + a<br />
⋅ sin ψ + a<br />
a r<br />
Cor<br />
ψ<br />
║BC<br />
C<br />
Cor<br />
Cor<br />
a r 31<br />
µ<br />
a r<br />
Cx<br />
⋅ sin ψ<br />
⋅cos<br />
ψ<br />
ψ<br />
a r<br />
a r Cor<br />
Cy<br />
4 : 1<br />
B<br />
B<br />
┴BC<br />
3 : 4<br />
a<br />
Cor<br />
=<br />
=<br />
2<br />
a<br />
+<br />
⋅ ω<br />
2<br />
2<br />
41n<br />
= = ω41<br />
⋅<br />
41<br />
⋅ v<br />
34<br />
v41<br />
BD<br />
D<br />
D<br />
ω = 41<br />
ε 41 =<br />
BD<br />
C<br />
v 41<br />
BD<br />
a 41t<br />
BD<br />
C