Elektronika 2011-10 I.pdf - Instytut Systemów Elektronicznych ...
Elektronika 2011-10 I.pdf - Instytut Systemów Elektronicznych ...
Elektronika 2011-10 I.pdf - Instytut Systemów Elektronicznych ...
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
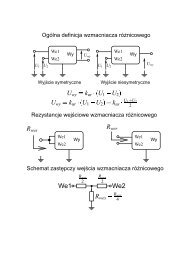
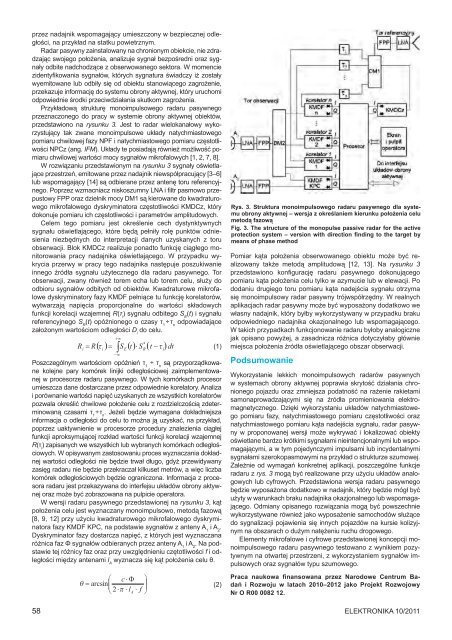
przez nadajnik wspomagający umieszczony w bezpiecznej odległości,na przykład na statku powietrznym.Radar pasywny zainstalowany na chronionym obiekcie, nie zdradzającswojego położenia, analizuje sygnał bezpośredni oraz sygnałyodbite nadchodzące z obserwowanego sektora. W momenciezidentyfikowania sygnałów, których sygnatura świadczy iż zostaływyemitowane lub odbiły się od obiektu stanowiącego zagrożenie,przekazuje informację do systemu obrony aktywnej, który uruchomiodpowiednie środki przeciwdziałania skutkom zagrożenia.Przykładową strukturę monoimpulsowego radaru pasywnegoprzeznaczonego do pracy w systemie obrony aktywnej obiektów,przedstawiono na rysunku 3. Jest to radar wielokanałowy wykorzystującytak zwane monoimpulsowe układy natychmiastowegopomiaru chwilowej fazy NPF i natychmiastowego pomiaru częstotliwościNPCz (ang. IFM). Układy te posiadają również możliwość pomiaruchwilowej wartości mocy sygnałów mikrofalowych [1, 2, 7, 8].W rozwiązaniu przedstawionym na rysunku 3 sygnały oświetlająceprzestrzeń, emitowane przez nadajnik niewspółpracujący [3–6]lub wspomagający [14] są odbierane przez antenę toru referencyjnego.Poprzez wzmacniacz niskoszumny LNA i filtr pasmowo przepustowyFPP oraz dzielnik mocy DM1 są kierowane do kwadraturowegomikrofalowego dyskryminatora częstotliwości KMDCz, którydokonuje pomiaru ich częstotliwości i parametrów amplitudowych.Celem tego pomiaru jest określenie cech dystynktywnychsygnału oświetlającego, które będą pełniły rolę punktów odniesienianiezbędnych do interpretacji danych uzyskanych z toruobserwacji. Blok KMDCz realizuje ponadto funkcję ciągłego monitorowaniapracy nadajnika oświetlającego. W przypadku wykryciaprzerwy w pracy tego nadajnika następuje poszukiwanieinnego źródła sygnału użytecznego dla radaru pasywnego. Torobserwacji, zwany również torem echa lub torem celu, służy doodbioru sygnałów odbitych od obiektów. Kwadraturowe mikrofalowedyskryminatory fazy KMDF pełniące tu funkcję korelatorów,wytwarzają napięcia proporcjonalne do wartości składowychfunkcji korelacji wzajemnej R(τ i) sygnału odbitego S E(t) i sygnałureferencyjnego S R(t) opóźnionego o czasy τ 1÷ τ nodpowiadającezałożonym wartościom odległości D ido celu.* R = R τ = S t ⋅ S t −τ(1)Poszczególnym wartościom opóźnień τ 1÷ τ nsą przyporządkowanekolejne pary komórek linijki odległościowej zaimplementowanejw procesorze radaru pasywnego. W tych komórkach procesorumieszcza dane dostarczane przez odpowiednie korelatory. Analizai porównanie wartości napięć uzyskanych ze wszystkich korelatorówpozwala określić chwilowe położenie celu z rozdzielczością zdeterminowanączasami τ 1÷ τ n. Jeżeli będzie wymagana dokładniejszainformacja o odległości do celu to można ją uzyskać, na przykład,poprzez uaktywnienie w procesorze procedury znalezienia ciągłejfunkcji aproksymującej rozkład wartości funkcji korelacji wzajemnejR(τ i) zapisanych we wszystkich lub wybranych komórkach odległościowych.W opisywanym zastosowaniu proces wyznaczania dokładnejwartości odległości nie będzie trwał długo, gdyż przewidywanyzasięg radaru nie będzie przekraczał kilkuset metrów, a więc liczbakomórek odległościowych będzie ograniczona. Informacja z procesoraradaru jest przekazywana do interfejsu układów obrony aktywnejoraz może być zobrazowana na pulpicie operatora.W wersji radaru pasywnego przedstawionej na rysunku 3, kątpołożenia celu jest wyznaczany monoimpulsowo, metodą fazową[8, 9, 12] przy użyciu kwadraturowego mikrofalowego dyskryminatorafazy KMDF KPC, na podstawie sygnałów z anteny A 1i A 2.Dyskryminator fazy dostarcza napięć, z których jest wyznaczanaróżnica faz Φ sygnałów odbieranych przez anteny A 1i A 2. Na podstawietej różnicy faz oraz przy uwzględnieniu czętotliwości f i odległościmiędzy antenami l Awyznacza się kąt położenia celu θ.⎛ c ⋅ Φ ⎞ θ = arcsin⎜⎟(2)⎝ 2 ⋅π⋅ lA⋅ f ⎠58i( ) ( ) ( ) dti+∞∫−∞ERiRys. 3. Struktura monoimpulsowego radaru pasywnego dla systemuobrony aktywnej – wersja z określaniem kierunku położenia celumetodą fazowąFig. 3. The structure of the monopulse passive radar for the activeprotection system – version with direction finding to the target bymeans of phase methodPomiar kąta położenia obserwowanego obiektu może być realizowanytakże metodą amplitudową [12, 13]. Na rysunku 3przedstawiono konfigurację radaru pasywnego dokonującegopomiaru kąta położenia celu tylko w azymucie lub w elewacji. Pododaniu drugiego toru pomiaru kąta nadejścia sygnału otrzymasię monoimpulsowy radar pasywny trójwspółrzędny. W realnychaplikacjach radar pasywny może być wyposażony dodatkowo wewłasny nadajnik, który byłby wykorzystywany w przypadku brakuodpowiedniego nadajnika okazjonalnego lub wspomagającego.W takich przypadkach funkcjonowanie radaru byłoby analogicznejak opisano powyżej, a zasadnicza różnica dotyczyłaby główniemiejsca położenia źródła oświetlającego obszar obserwacji.PodsumowanieWykorzystanie lekkich monoimpulsowych radarów pasywnychw systemach obrony aktywnej poprawia skrytość działania chronionegopojazdu oraz zmniejsza podatność na rażenie rakietamisamonaprowadzającymi się na źródła promieniowania elektromagnetycznego.Dzięki wykorzystaniu układów natychmiastowegopomiaru fazy, natychmiastowego pomiaru częstotliwości oraznatychmiastowego pomiaru kąta nadejścia sygnału, radar pasywnyw proponowanej wersji może wykrywać i lokalizować obiektyoświetlane bardzo krótkimi sygnałami nieintencjonalnymi lub wspomagającymi,a w tym pojedynczymi impulsami lub incydentalnymisygnałami szerokopasmowymi na przykład o strukturze szumowej.Zależnie od wymagań konkretnej aplikacji, poszczególne funkcjeradaru z rys. 3 mogą być realizowane przy użyciu układów analogowychlub cyfrowych. Przedstawiona wersja radaru pasywnegobędzie wyposażona dodatkowo w nadajnik, który będzie mógł byćużyty w warunkach braku nadajnika okazjonalnego lub wspomagającego.Odmiany opisanego rozwiązania mogą być powszechniewykorzystywane również jako wyposażenie samochodów służącedo sygnalizacji pojawienia się innych pojazdów na kursie kolizyjnymna obszarach o dużym natężeniu ruchu drogowego.Elementy mikrofalowe i cyfrowe przedstawionej koncepcji monoimpulsowegoradaru pasywnego testowano z wynikiem pozytywnymna otwartej przestrzeni, z wykorzystaniem sygnałów impulsowychoraz sygnałów typu szumowego.Praca naukowa finansowana przez Narodowe Centrum Badańi Rozwoju w latach 20<strong>10</strong>–2012 jako Projekt RozwojowyNr O R00 0082 12.<strong>Elektronika</strong> <strong>10</strong>/<strong>2011</strong>