

Model af solfangeranlæg - VBN - Aalborg Universitet
Model af solfangeranlæg - VBN - Aalborg Universitet
Model af solfangeranlæg - VBN - Aalborg Universitet

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
8.3 Finjustering <strong>af</strong> regulator<br />
Det ønskes at undersøge, hvordan forskellige KP - og KI-værdier påvirker systemet.<br />
Generelt vil effekten <strong>af</strong> proportionalleddet KP være et hurtigere transient respons,<br />
hvorved temperaturen hurtigere vil svinge ind til stationær tilstand. Integralleddet<br />
KI sløver generelt det transiente respons, mens det stationære respons forbedres. I<br />
dette tilfælde øges systemets orden fra type 0 til type 1, hvorved den stationære fejl<br />
fjernes, jævnfør tabel 7.6 på side 65.<br />
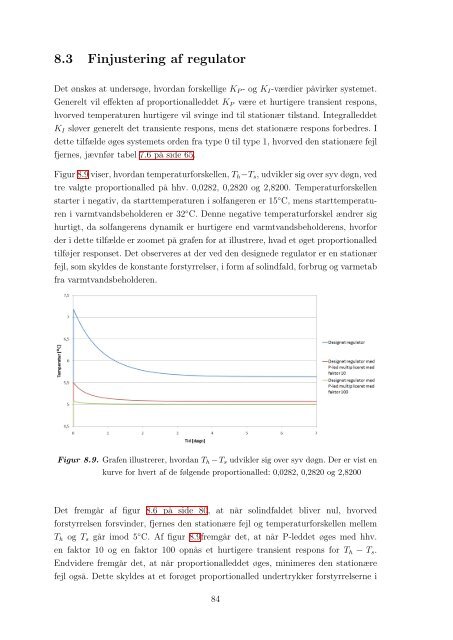
Figur 8.9 viser, hvordan temperaturforskellen, Th−Ts, udvikler sig over syv døgn, ved<br />
tre valgte proportionalled på hhv. 0,0282, 0,2820 og 2,8200. Temperaturforskellen<br />
starter i negativ, da starttemperaturen i solfangeren er 15 ◦ C, mens starttemperatu-<br />
ren i varmtvandsbeholderen er 32 ◦ C. Denne negative temperaturforskel ændrer sig<br />
hurtigt, da solfangerens dynamik er hurtigere end varmtvandsbeholderens, hvorfor<br />
der i dette tilfælde er zoomet på gr<strong>af</strong>en for at illustrere, hvad et øget proportionalled<br />
tilføjer responset. Det observeres at der ved den designede regulator er en stationær<br />
fejl, som skyldes de konstante forstyrrelser, i form <strong>af</strong> solindfald, forbrug og varmetab<br />
fra varmtvandsbeholderen.<br />
Figur 8.9. Gr<strong>af</strong>en illustrerer, hvordan Th − Ts udvikler sig over syv døgn. Der er vist en<br />
kurve for hvert <strong>af</strong> de følgende proportionalled: 0,0282, 0,2820 og 2,8200<br />
Det fremgår <strong>af</strong> figur 8.6 på side 80, at når solindfaldet bliver nul, hvorved<br />
forstyrrelsen forsvinder, fjernes den stationære fejl og temperaturforskellen mellem<br />
Th og Ts går imod 5 ◦ C. Af figur 8.9fremgår det, at når P-leddet øges med hhv.<br />
en faktor 10 og en faktor 100 opnås et hurtigere transient respons for Th − Ts.<br />
Endvidere fremgår det, at når proportionalleddet øges, minimeres den stationære<br />
fejl også. Dette skyldes at et forøget proportionalled undertrykker forstyrrelserne i<br />
84














