Appendix
Appendix
Appendix

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Del III Numeriske modeller G CST- og LST-elementopbygning<br />
70<br />
2 2 2<br />
( a b bν) 2<br />
b( − 1+ ν ) a ( − 1+ ν) a<br />
2<br />
b(<br />
− 1+<br />
ν ) ( − 1+ ν) 0<br />
( − 1+<br />
ν)<br />
1<br />
( − 1+ ν) 2 2 2<br />
2( − a + aν−2b )<br />
2<br />
b( − 1+<br />
ν ) a<br />
−1 ( − 1+ ν) −2a<br />
( ν + 1) b<br />
1<br />
( − 1+<br />
ν)<br />
0<br />
4a−1 2 2 2<br />
− 22 ( a + b −bν)<br />
1 −2b−1 2<br />
b( − 1+ ν )<br />
−1 ( − 1+ ν) −2a 2<br />
b( − 1+<br />
ν ) a<br />
1<br />
( − 1+ ν) 2 2 ( − a + aν− 2<br />
b )<br />
( ν + 1) a<br />
−1<br />
( − 1+<br />
ν)<br />
4b<br />
(G.28)<br />
( − 1+ ν) ( ν + 1) b ( − 1+ ν) 2<br />
b( − 1+ ν ) a ( − 1+<br />
ν)<br />
2 ( − 1+<br />
ν ) a<br />
0<br />
1<br />
( − 1 + ν) −2b ( ν + 1) a<br />
−1<br />
( − 1+ ν) 2 2 2<br />
− 22 ( a + b −bν)<br />
2<br />
b( − 1 + ν ) a<br />
1<br />
( − 1+<br />
ν)<br />
1<br />
( − 1+ ν) 0<br />
−1<br />
( − 1+ ν) 4b 2 ( − 1+ ν ) a<br />
1<br />
( − 1+<br />
ν)<br />
2 2 2<br />
2( − a + aν−2b )<br />
2<br />
b( − 1+<br />
ν ) a<br />
⎡− 22 + − 1 4 −1<br />
1 ⎤<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
Et<br />
k4<br />
= ⎢ ⎥<br />
3 ⎢<br />
2 2<br />
⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎣⎢ ⎥⎦<br />
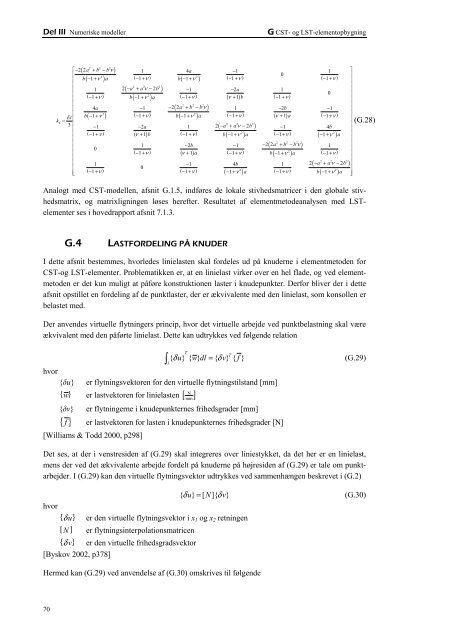
Analogt med CST-modellen, afsnit G.1.5, indføres de lokale stivhedsmatricer i den globale stivhedsmatrix,<br />
og matrixligningen løses herefter. Resultatet af elementmetodeanalysen med LSTelementer<br />
ses i hovedrapport afsnit 7.1.3.<br />
G.4 LASTFORDELING PÅ KNUDER<br />
I dette afsnit bestemmes, hvorledes linielasten skal fordeles ud på knuderne i elementmetoden for<br />
CST-og LST-elementer. Problematikken er, at en linielast virker over en hel flade, og ved elementmetoden<br />
er det kun muligt at påføre konstruktionen laster i knudepunkter. Derfor bliver der i dette<br />
afsnit opstillet en fordeling af de punktlaster, der er ækvivalente med den linielast, som konsollen er<br />
belastet med.<br />
Der anvendes virtuelle flytningers princip, hvor det virtuelle arbejde ved punktbelastning skal være<br />
ækvivalent med den påførte linielast. Dette kan udtrykkes ved følgende relation<br />
T<br />
T<br />
∫ { δu} { w} dl = { δv}<br />
{ f}<br />
l<br />
(G.29)<br />
hvor<br />
{δu} er flytningsvektoren for den virtuelle flytningstilstand [mm]<br />
{ }<br />
N<br />
w er lastvektoren for linielasten [ mm ]<br />
{δv} er flytningerne i knudepunkternes frihedsgrader [mm]<br />
{ f } er lastvektoren for lasten i knudepunkternes frihedsgrader [N]<br />
[Williams & Todd 2000, p298]<br />
Det ses, at der i venstresiden af (G.29) skal integreres over liniestykket, da det her er en linielast,<br />
mens der ved det ækvivalente arbejde fordelt på knuderne på højresiden af (G.29) er tale om punktarbejder.<br />
I (G.29) kan den virtuelle flytningsvektor udtrykkes ved sammenhængen beskrevet i (G.2)<br />
{ δu} = [ N]{ δv}<br />
(G.30)<br />
hvor<br />
{ δ u}<br />
er den virtuelle flytningsvektor i x1 og x2 retningen<br />
[ N ] er flytningsinterpolationsmatricen<br />
{ δ v}<br />
er den virtuelle frihedsgradsvektor<br />
[Byskov 2002, p378]<br />
Hermed kan (G.29) ved anvendelse af (G.30) omskrives til følgende