Regelung von regenerativen Energiesystemen <strong>Formelsammlung</strong> (WS13/14) Technische Universität München, Christoph Hackl <strong>Stand</strong> 26. 11. 2013 Die Matrizen J und T P (φ) kommutieren, d.h. [ ] −sin(φ) −cos(φ) ∀φ ∈ R: JT P (φ) = = T P (φ)J, (58) cos(φ) −sin(φ) Für d dt und φ =: ω gilt [Analogie zu D. Schröder: e j(π 2 +φ) = e j(φ+π 2 ) = je jφ ]. [ ] Ṫ P (φ) := d −sin(φ) −cos(φ) dt T P(φ) = ω = ωJT P (φ) = ωT P (φ)J (59) cos(φ) −sin(φ) [Analogie zu D. Schröder: Ṫ P (φ) −1 := d dt T P(φ) −1 = ω [Analogie zu D. Schröder: [ −sin(φ) cos(φ) d dt ejφ = jωe jφ = e j(π 2 +φ) = ωe j(φ+π 2 ) ] −cos(φ) −sin(φ) ] d dt e−jφ = −jωe −jφ ] = −ωJT P (φ) −1 = −ωT P (φ) −1 J Mit der Konvention φ k = φ lässt sich mithilfe der Park-Transformation T P (φ k ) ausgehend von einem statorfesten Koordinatensystem (α,β) in ein (beliebiges) umlaufendes k-Koordinatensystem (d,q) (Superskript x k = (x d , x q ) ⊤ ) übergegangen werden (60) x k = T P (−φ k )x s = T P (φ k ) −1 x s =⇒ x s = T P (φ k )x k , (61) z.B. zur Rotorfluss-Orientierung (d.h. ψr q = ˙ψ r q = 0 und ψr d = ‖ψr‖ r = ∥ ∥ ∥ψ k r ∥, der Rotorfluss im k-Koordinatensystem liegt ‘exakt’ auf der d-Achse). — Seite 10/12 —
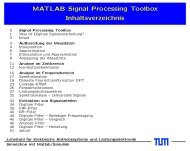
Optimierungstabelle y ref ′ y ref,0 ′ ✻ 1 Führungsgröße z z 0 ✻ 1 Störgröße — Seite 11/12 — z F S y ′ { }} { y ref ref ✲ ✲ ❡ ✲ ✲ ❄ F R ❡− y F G ✲F Sσ ✲F S1 ✲F S2 ✲ ✻− Führungsglättung Regler Strecke Strecke Regler y y ′ ref,0 y ∞ y ′ ref,0 0 ✻ 1 0 t an t aus ✲ t y max y ′ ref,0 ±2% ✲ t 0 y y max V S z 0 ✻ y V S z 0 ∞ V S z 0 0 ❩ ❩ Wendetangente ❩ ❩ Verhalten bei Sprung der Einstellung Führungsgröße y ref (bzw. y ref ′ ) Störgröße z Nr. Günstiger Opt. Nr. Typ F S Typ F R t an t aus y max y ∞ T ers t an 1 y max 1 y ∞ Bereich Krit. T n V R T v T G (±2%) T σ T σ y ref,0 ′ y ref,0 ′ T σ T σ V S z 0 V S z 0 V S 1 1 1 PT 1 beliebig I V R BO — — — 4,7 8,4 1,04 1 2 6,3 0,64 0 1 1+sT σ s 2T σ V S ( ) T 1 2 ≫ 1 P V R BO — T 1 — — (4,7) (8,4) 1,04 y ∞ V R V S 1 1 T σ 2T σ V S y ′ 2 (4,7) ≈ 2 ref,0 1+V R V S 1+V R V S 1+V R V S √ V S T 1 1+sT n T 1 T1 0,5...1,2 3 PT 2 > 1 PI V R BO T 1 — — 4,7 8,4 1,04 1 2 5,5 0 3 (1+sT 1 )(1+sT σ ) T σ sT n 2T σ V S T σ T 1 /T σ T 1 1+sT n T 1 — 3,1 ... 4,7 8,4 ... 16,5 1,04 ... 1,43 1 — 1,2...1,6 4 ≥ 4 PI V R SO 4T σ — ≈ 10 0 4 T σ sT n 2T σ V S 0..4Tσ 4,7 ... 7,6 8,4 ... 13,3 1,04 ... 1,08 1 2 ... 4 T 1 /T σ ( ) T 1 5 ≫ 1 PD V R (1+sT v ) BO — T 1 T 2 — (4,7) (8,4) 1,04 y ∞ V R V S T σ 2T σ V S y ′ 2 4+ T 2 1 1 ≈ 5 ref,0 1+V R V S T σ 1+V R V S 1+V R V S √ V S T 1 (1+sT n )(1+sT v ) T 1 T 1 T 2 0,5...0,75 6 PT 3 > 1 PID V R BO T 1 T 2 — 4,7 8,4 1,04 1 2 4,4 √ √ (1+sT 1 )(1+sT 2 )(1+sT σ ) T σ sT n 2T σ V S T 2 0 6 σ T1 /T σ T2 /T σ √ T 1 (1+sT n )(1+sT v ) T 1 — 3,1 ... 4,7 8,4 ... 16,5 1,04 ... 1,43 1 — T2 1,4...1,8 7 T 2 > T σ ≥ 4 PID V R SO 4T σ T 2 ≈ 10 4 √ 0 7 T σ sT n 2T σ V S 0..4Tσ 4,7 ... 7,6 8,4 ... 13,3 1,04 ... 1,08 1 2 ... 4 T σ T 1 /T σ T2 /T σ T 1 8 ≫ 1 P V R BO — T 1 — — 4,7 8,4 1,04 1 2 (4,7) ≈ 1 1 8 V V S T σ 2T σ V S V R V S V R V S S IT 1 sT 1 (1+sT σ ) 1+sT n T 1 — 3,1 16,5 1,43 1 — 1,6 9 beliebig PI V R SO 4T σ — 10 0 9 sT n 2T σ V S 4Tσ 7,6 13,3 1,08 1 4 T 1 /T σ T 1 10 ≫ 1 PD V R (1+sT v ) BO — T 1 T 2 — 4,7 8,4 1,04 1 2 4+ T 2 ≈ 1 1 10 V V S T σ 2T σ V S T σ V R V S V R V S S IT 2 √ sT 1 (1+sT 2 )(1+sT σ ) (1+sT n )(1+sT v ) T 1 — 3,1 16,5 1,43 1 — T2 1,8 11 beliebig PID V R SO 4T σ T 2 ≈ 10 4 √ 0 11 T 2 > T σ sT n 2T σ V S 4T σ 7,6 13,3 1,08 1 4 T σ T 1 /T σ T2 /T σ Abbildung 2: Optimierungstabelle <strong>für</strong> exakt bekannte Strecken mit Ordnung n ≤ 3 und rein reellen Polen (T 1 , T 2 ...große Zeitkonstanten, T σ ...kleine (Ersatz-)Zeitkonstante). t an ✲ t ✲ t Technische Universität München, Christoph Hackl <strong>Stand</strong> 26. 11. 2013 Regelung von regenerativen Energiesystemen <strong>Formelsammlung</strong> (WS13/14)