Formelsammlung (Stand: 26.11.2013) - EAL Lehrstuhl für ...
Formelsammlung (Stand: 26.11.2013) - EAL Lehrstuhl für ...
Formelsammlung (Stand: 26.11.2013) - EAL Lehrstuhl für ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Regelung von regenerativen Energiesystemen<br />
<strong>Formelsammlung</strong> (WS13/14)<br />
Technische Universität München, Christoph Hackl <strong>Stand</strong> 26. 11. 2013<br />
1 Trigonometrische Formeln (siehe [1])<br />
Im Folgenden gelte x,y ∈ R (bei entsprechender Einschränkung des Bereiches falls notwendig).<br />
sin(x±y) = sin(x)cos(y)±cos(x)sin(y) (1)<br />
cos(x±y) = cos(x)cos(y)∓sin(x)sin(y) (2)<br />
tan(x±y) = tan(x)±tan(y)<br />
1∓tan(x)tan(y) = sin(x±y)<br />
cos(x±y)<br />
(3)<br />
sin(x)sin(y) = 1 ( )<br />
cos(x−y)−cos(x+y) (4)<br />
2<br />
cos(x)cos(y) = 1 ( )<br />
cos(x−y)+cos(x+y) (5)<br />
2<br />
sin(x)cos(y) = 1 ( )<br />
sin(x−y)+sin(x+y) (6)<br />
2 ( ) ( ) x+y x−y<br />
sin(x)+sin(y) = 2sin sin<br />
(7)<br />
2 2<br />
( ) ( ) x+y x−y<br />
sin(x)−sin(y) = 2cos sin<br />
(8)<br />
2 2<br />
( ) ( ) x+y x−y<br />
cos(x)+cos(y) = 2cos cos<br />
(9)<br />
2 2<br />
( ) ( ) y +x y −x<br />
cos(x)−cos(y) = 2sin sin<br />
(10)<br />
2 2<br />
⎧<br />
( 1<br />
⎨<br />
π<br />
−arctan(x) ,x > 0<br />
arctan = 2<br />
x)<br />
⎩− 2 −arctan(x) ,x < 0. (11)<br />
arctan(−x) = −arctan(x) (12)<br />
Folgende Funktionswerte arctan(x) ergeben sich <strong>für</strong> ausgewählte Argumente x:<br />
x ±∞ ± √ 3 ±1 ± 1 √<br />
3<br />
0<br />
arctan(x) ± π 2<br />
± π 3<br />
± π 4<br />
± π 6<br />
0<br />
Tabelle 1: Ausgewählte Argumente <strong>für</strong> und Funktionswerte von arctan : R → R.<br />
x [ ◦ ] 0 [0 ◦ ]<br />
sin(x) 0<br />
cos(x) 1<br />
tan(x) 0<br />
π π<br />
6 [30◦ ]<br />
4 [45◦ ]<br />
√<br />
1 2<br />
√2<br />
3<br />
√2<br />
2<br />
2 2<br />
1<br />
√<br />
3<br />
1<br />
π π 2π 3π<br />
3 [60◦ ]<br />
2 [90◦ ]<br />
3 [120◦ ]<br />
4 [135◦ ] π [180 ◦ 3π<br />
]<br />
2 [270◦ ]<br />
√ √ √<br />
3 3 2<br />
1<br />
0 −1<br />
2 2 2<br />
1<br />
0 − 1 √<br />
2<br />
− −1 0<br />
2 2 2<br />
√ √<br />
3 ±∞ − 3 −1 0 ±∞<br />
Tabelle 2: Ausgewählte Argumente <strong>für</strong> und Funktionswerte von cos, sin, tan : R → R.<br />
— Seite 1/12 —
Regelung von regenerativen Energiesystemen<br />
<strong>Formelsammlung</strong> (WS13/14)<br />
Technische Universität München, Christoph Hackl <strong>Stand</strong> 26. 11. 2013<br />
2 Energieeinheiten und Umrechnungsfaktoren<br />
Energieträger Energiegehalt Anmerkung<br />
1 [kg] Steinkohle 8.14 [kWh] –<br />
1 [kg] Rohöl 11.63 [kWh] Benzin: 8.7 [kWh/Liter]; Diesel: 9.8 [kWh/Liter]<br />
1 [m 3 ] Erdgas 8.82 [kWh] –<br />
1 [kg] Holz 4.3 [kWh] (bei 15% Feuchte)<br />
Tabelle 3: Umrechnungsfaktoren verschiedener Energieträger (siehe [2, Tab. 1.2])<br />
[kJ] [kcal] [kWh] [kg] SKE [kg] RÖE [m 3 Erdgas]<br />
1[kJ] = 1000[Ws] 1 0.2388 2.78·10 −4 3.4·10 −5 2.4·10 −5 3.2·10 −5<br />
1[kcal] 4.1868 1 1.163·10 −3 1.43·10 −4 1·10 −4 1.3·10 −4<br />
1[kWh] 3600 860 1 0.123 0.086 0.113<br />
1[kg] SKE 29308 7000 8.14 1 0.7 0.923<br />
1[kg] RÖE 41868 10000 11.63 1.428 1 1.319<br />
1[m 3 Erdgas] 31736 7580 8.816 1.083 0.758 1<br />
Tabelle 4: Umrechnungsfaktoren zwischen verschiedenen Energieeinheiten (siehe [3, Tab. 1.1]) mit den<br />
Abkürzungen [kJ]: Kilojoule, [Ws]: Wattsekunde, [kcal]: Kilokalorie, [kWh]: Kilowattstunde,<br />
[SKE]: Steinkohleeinheit, RÖE: Rohöleinheit und [ m 3] : Kubikmeter (Volumen).<br />
Vorsatz Symbol Wert Vorsatz Symbol Wert<br />
Milli m 10 −3 (Tausendstel) Kilo k 10 3 (Tausend)<br />
Mikro µ 10 −6 (Millionstel) Mega M 10 6 (Million)<br />
Nano n 10 −9 (Milliardstel) Giga G 10 9 (Milliarde)<br />
Piko p 10 −12 (Billionstel) Tera T 10 12 (Billion)<br />
Femto f 10 −15 (Billiardstel) Peta P 10 15 (Billiarde)<br />
Atto a 10 −18 (Trillionstel) Exa E 10 18 (Trillion)<br />
Tabelle 5: Vorsätze, Symbole und Faktoren<br />
3 Wechsel- und Drehstromsysteme (siehe [4])<br />
Im Folgenden sei t 0 ≥ 0 ein beliebiger Zeitpunkt und x: R ≥0 → R ein periodisches Signal mit<br />
Periodendauer T > 0 [s] (d.h. x(t) = x(t+T) <strong>für</strong> alle t ≥ 0) und Amplitude ˆx > 0.<br />
• Gleichwert oder arithmetischer Mittelwert:<br />
X := 1 T<br />
t∫<br />
0 +T<br />
t 0<br />
x(τ)dτ = 1 T<br />
∫ T<br />
0<br />
x(τ)dτ (13)<br />
— Seite 2/12 —
Regelung von regenerativen Energiesystemen<br />
<strong>Formelsammlung</strong> (WS13/14)<br />
Technische Universität München, Christoph Hackl <strong>Stand</strong> 26. 11. 2013<br />
• Gleichrichtwert:<br />
X DC := 1 T<br />
t∫<br />
0 +T<br />
|x(τ)|dτ = 1 T<br />
∫ T<br />
|x(τ)|dτ (14)<br />
(<strong>für</strong> sinus- oder cosinusförmige Signale gilt X DC =<br />
t 0<br />
0<br />
2<br />
πˆx ≈ 0.637ˆx)<br />
• Effektivwert (engl. root-mean-square/RMS value) oder quadratischer Mittelwert:<br />
X eff := √ 1 t∫<br />
0 +T<br />
√ 1 ∫ T<br />
x(τ)<br />
T T<br />
2 dτ (15)<br />
t 0<br />
x(τ) 2 dτ =<br />
(<strong>für</strong> sinus- oder cosinusförmige Signale gilt X eff = ˆx √<br />
2<br />
≈ 0.707ˆx)<br />
• Momentanleistung im Wechselstromsystem mit Stromi(t) [A] und Spannungu(t) [V]<br />
0<br />
∀t ≥ 0: p ∼ (t) := u(t)i(t) [W] (16)<br />
• Momentanleistung im Drehstromsystem mit Strangströmeni abc (t) = (i a (t), i b (t), i c (t)) ⊤ [A] 3<br />
und Strangspannung u abc (t) = (u a (t), u b (t), u c (t)) ⊤ [V] 3 (jeweils vektoriell zusammengefasst;<br />
drei Stränge mit den Bezeichnungen a,b,c)<br />
∀t ≥ 0: p 3∼ (t) := u abc (t) ⊤ i abc (t) = u a (t)i a (t)+u b (t)i b (t)+u c (t)i c (t)[W] (17)<br />
• Mittlere Leistung <strong>für</strong> periodische Ströme und Spannungen mit Periodendauer T > 0<br />
P ∼ := 1 T<br />
∫ T<br />
0<br />
p ∼ (τ)dτ bzw. P 3∼ := 1 T<br />
∫ T<br />
0<br />
p 3∼ (τ)dτ (18)<br />
• Scheinleistung <strong>für</strong> sinusförmige Ströme und Spannungen mit Periodendauer T > 0<br />
S ∼ := U eff I eff [VA] bzw. S 3∼ := 3U eff I eff [VA] (19)<br />
die Effektivwerte der Stranggrößen sind (Sternschal-<br />
wobei U eff = U eff und I eff = I eff<br />
tung).<br />
• Wirkleistung <strong>für</strong> sinusförmige Ströme und Spannungen mit Periodendauer T > 0<br />
P ∼ := S ∼ cos(ϕ) = U eff I eff cos(ϕ) [W] bzw.<br />
P 3∼ := S 3∼ cos(ϕ) = 3U eff I eff cos(ϕ) [W]<br />
(20)<br />
• Blindleistung <strong>für</strong> sinusförmige Ströme und Spannungen mit Periodendauer T > 0<br />
Q ∼ := S ∼ sin(ϕ) = U eff I eff sin(ϕ) [var] bzw.<br />
Q 3∼ := S 3∼ sin(ϕ) = 3U eff I eff sin(ϕ) [var]<br />
(21)<br />
— Seite 3/12 —
Regelung von regenerativen Energiesystemen<br />
<strong>Formelsammlung</strong> (WS13/14)<br />
Technische Universität München, Christoph Hackl <strong>Stand</strong> 26. 11. 2013<br />
4 Grundlagen linearer Regelungstechnik (siehe [1, 5, 6, 7])<br />
• Lösungsformel <strong>für</strong> ax 2 +bx+c = 0<br />
x 1,2 = −b (<br />
1±<br />
2a<br />
√<br />
1−4 ac<br />
b 2 )<br />
<strong>für</strong> a,b,c ∈ R (22)<br />
• Rechenregeln <strong>für</strong> Logarithmus zur Basis x<br />
log x (a·b c ) = log x (a)+clog x (b) <strong>für</strong> a,b,c,x ∈ R (23)<br />
• Komplexe Rechnung<br />
s = σ +j ·ω = |s|exp(j∠s) ∈ C <strong>für</strong> σ,ω ∈ R (24)<br />
wobei s ∗ := σ −j ·ω, |s| = √ s ∗ s = √ R{s} 2 +I{s} 2 und tan∠s = I{s}<br />
R{s} . Dann<br />
∠s = arctan<br />
( ) I{s}<br />
+<br />
R{s}<br />
⎧<br />
⎪⎨ 0 ,I{s} ≥ 0∧R{s} ≥ 0<br />
π ,(I{s} < 0∨I{s} > 0)∧R{s} ≤ 0<br />
⎪⎩<br />
2π ,I{s} ≤ 0∧R{s} ≥ 0.<br />
(25)<br />
• Laplace-Transformation x(s) = ∫ ∞<br />
0<br />
x(t)exp(−st)dt (oder kurz x(t) ❞ x(s))<br />
Für a,b ∈ R und a ≠ b gilt:<br />
ẋ(t) ❞ sx(s)−x(0+) ∗ (26)<br />
ẍ(t) ❞ s 2 x(s)−sx(0+)−ẋ(0+) ∗ (27)<br />
{<br />
1 ,t ≥ T<br />
σ(t−T) = ❞ e −sT<br />
(28)<br />
0 ,t < T s<br />
t n ,n ∈ N ❞ n!<br />
0 (29)<br />
s n+1<br />
1<br />
a−b (exp(−bt)−exp(−at)) ❞ 1<br />
(30)<br />
(s+a)(s+b)<br />
exp(−at)cos(bt) ❞ <br />
1<br />
b exp(−at)sin(bt) ❞ 1<br />
s+a<br />
(s+a) 2 +b 2 (31)<br />
(32)<br />
(s+a) 2 +b 2<br />
1 ❞ 1<br />
(<br />
)<br />
exp(−at)−exp(−bt)+(a−b)texp(−bt) (33)<br />
(s+a)(s+b) 2 (a−b) 2<br />
• Faltungsregel <strong>für</strong> Impulsantworten f(t) ❞ F(s) und g(t) ❞ G(s)<br />
f(t)∗g(t) :=<br />
∫ t<br />
0<br />
f(τ)g(t−τ)dτ ❞ F(s)G(s) (34)<br />
— Seite 4/12 —
Regelung von regenerativen Energiesystemen<br />
<strong>Formelsammlung</strong> (WS13/14)<br />
Technische Universität München, Christoph Hackl <strong>Stand</strong> 26. 11. 2013<br />
• Additivität von Betrag (in [dB]) und Phase im Bode-Diagramm<br />
F(jω) = F 1 (jω)·...·F n (jω)<br />
= |F 1 (jω)|exp(j∠F 1 (jω))·...·|F n (jω)|exp(j∠F n (jω)) (35)<br />
|F(jω)| dB = 20log(|F 1 (jω)|·...·|F n (jω)|)<br />
= 20log(|F 1 (jω)|)+...+20log(|F n (jω)|)<br />
= |F 1 (jω)| dB +...+|F n (jω)| dB (36)<br />
∠F(jω) = ∠F 1 (jω)+...+∠F n (jω) (37)<br />
• <strong>Stand</strong>ardreglerstrukturen<br />
P-Regler:<br />
u(t) = V R e(t) ❞ F P (s) = u(s)<br />
e(s) = V R (38)<br />
PI-Regler:<br />
u(t) = V R<br />
(<br />
e(t)+ 1 T n<br />
∫<br />
)<br />
e(t)dt<br />
❞ F PI (s) = u(s) (<br />
e(s) = V R 1+ 1 ) ( ) 1+sTn<br />
= V R<br />
sT n sT n<br />
(39)<br />
PD-Regler:<br />
u(t) = V R (e(t)+T v ė(t)) ❞ F PD (s) = u(s)<br />
e(s) = V R(1+sT v ) (40)<br />
PID-Regler:<br />
u(t) = V R<br />
(e(t)+T v ė(t)+<br />
∫ ) e(t)<br />
dt<br />
T n<br />
❞ F PID (s) = u(s) (<br />
e(s) = V R 1+sT v + 1 )<br />
sT n<br />
( ) 1+sTn +s 2 T v T n<br />
= V R<br />
sT n<br />
(41)<br />
• Anfangs- und Endwertsätze <strong>für</strong> F(s) = y(s)<br />
u(s) = Z(s)<br />
N(s)<br />
Wenn die Endwerte lim t→0+ y(t), lim t→∞ y(t) und lim t→0 ẏ(t) existieren und endlich sind,<br />
dann gilt<br />
lim<br />
t→0+<br />
lim<br />
t→∞<br />
y(t) = lim(sF(s)u(s)) <strong>für</strong> deg(Z) < deg(N) (42)<br />
s→∞<br />
y(t) = lim(sF(s)u(s)) (43)<br />
s→0<br />
limẏ(t) = lim(s 2 F(s)u(s)) (44)<br />
t→0 s→∞<br />
wobei deg(Z) und deg(N) die Ordnung des Zähler- bzw. Nennerpolynoms beschreiben.<br />
• Stabilität von linearen Regelkreisen<br />
Ein Regelkreis der Ordnung m,n ∈ N 0 , V S ∈ R, c 0 ,...,c m−1 ∈ R und a 0 ,...,a n−1 ∈ R<br />
— Seite 5/12 —
Regelung von regenerativen Energiesystemen<br />
<strong>Formelsammlung</strong> (WS13/14)<br />
Technische Universität München, Christoph Hackl <strong>Stand</strong> 26. 11. 2013<br />
mit der Übertragungsfunktion<br />
F S (s) = y(s)<br />
u(s) := V Z(s)<br />
S<br />
N(s) = V S<br />
c 0 +c 1 s+···+c m−1 s m−1 +s m<br />
a 0 +a 1 s+···+a n−1 s n−1 +s n mit m ≤ n (45)<br />
zwischen Eingang u(s) und Ausgang y(s) ist (exponentiell) stabil (d.h. Systemantwort<br />
klingt ab), wenn alle Pole λ i von F S (s), d.h. alle Nullstellen des Nennerpolynoms N(λ i ) =<br />
0 negativen Realteil R{λ i } < 0 <strong>für</strong> alle i = 1,...,n besitzen.<br />
• Routh-Hurwitz Stabilitätskriterium <strong>für</strong> lineare Regelkreise<br />
Dazu untersucht man das charakteristische Polynom n-ter Ordnung des LTI Systems<br />
N(s) = a 0 +a 1 s+a 2 s 2 +···+a n s n , a 0 ,...,a n ∈ R. (46)<br />
Das charakteristische Polynom entspricht dem Nennerpolynom der Übertragungsfunktion<br />
F S (s) in (44). Es gilt: N(s) ist ein Hurwitz-Polynom (d.h. System ist exponentiell stabil),<br />
(i) dann sind alle Koeffizienten a i > 0 in N(s) (notwendige Bedingung, d.h. nicht unbedingt<br />
ausreichend!);<br />
(ii) genau dann, wenn der Koeffizient a n > 0 und alle nordwestlichen Hurwitz-Unterdeterminanten<br />
D i > 0 <strong>für</strong> i = 1,...,n−1 (notwendige & hinreichende Bedingung) 1<br />
Die Unterdeterminanten D i entstehen aus den Determinanten der entsprechenden (i,i)-<br />
Untermatrizen in der linken oberen (“nordwestlichen”) Ecke der Koeffizienten-Matrix<br />
⎡<br />
M n =<br />
⎢<br />
⎣<br />
⎤<br />
a n−1 a n−3 a n−5 ... a n−2n+3 a n−2n+1<br />
a n a n−2 a n−4 ... a n−2n+4 a n−2n+2<br />
0 a n−1 a n−3 ... a n−2n+5 a n−2n+3<br />
0 a n a n−2 ... a n−2n+6 a n−2n+4<br />
.<br />
.<br />
.. .<br />
⎥<br />
0 0 ... ... a 1 0 ⎦<br />
0 0 ... ... a 2 a 0<br />
∈ R n×n . (47)<br />
Zu untersuchen sind D 1 = a n−1 und D 2 =<br />
∣ a ∣<br />
n−1 a n−3 ∣∣∣<br />
, etc. Es gilt a<br />
a n a −k = 0 <strong>für</strong> k > 0.<br />
n−2<br />
• Kausalität (Realisierbarkeit)<br />
Ein lineares dynamisches System F S (s) = y(s) := V u(s) S Z(s) = V N(s) S c 0+c 1 s+···+c m−1 s m−1 +s m<br />
a 0 +a 1 s+···+a n−1<br />
wird<br />
s n−1 +s n<br />
kausal genannt, wenn m ≤ n. Die Systemantwort y(t) eines kausalen Systems hängt<br />
lediglich vom (vorangegangenen) Verlauf der Eingangsgröße u(τ) mit 0 ≤ τ ≤ t ab.<br />
• Zustandsdarstellung eines LTI 1 Systems (Regelungsnormalform)<br />
1 Falls alle Koeffizienten a i > 0 kann über das Liénard-Chipart-Kriterium die Anzahl der zu untersuchenden<br />
Determinaten reduziert werden. Es müssen lediglich die Determinanten D i mit ungeradem Index i = 1,3,5,...<br />
oder geradem Index i = 2,4,6,... auf Positivität geprüft werden. Dieser Sachverhalt basiert auf der linearen<br />
Abhängigkeit der Determinaten <strong>für</strong> a i > 0 <strong>für</strong> alle i = 1,2,3,....<br />
1 linearen, zeit-invarianten (engl. linear, time-invariant)<br />
— Seite 6/12 —
Regelung von regenerativen Energiesystemen<br />
<strong>Formelsammlung</strong> (WS13/14)<br />
Technische Universität München, Christoph Hackl <strong>Stand</strong> 26. 11. 2013<br />
Zustandsgleichung (Vektordifferentialgleichung) und Ausgangsgleichung eines dynamischen<br />
Systems n-ter Ordnung<br />
}<br />
ẋ(t) = Ax(t)+bu(t) ,x(0) = x 0 ∈ R n<br />
y(t) = c ⊤ (48)<br />
x(t)<br />
mit<br />
– dem Zustandsvektor x(t) = ( x 1 (t), ..., x n (t) ) ⊤<br />
∈ R (z.B. Motorstrom & -drehzahl)<br />
– der Stellgröße u(t) ∈ R (z.B. Motorspannung oder -moment)<br />
– der Systemmatrix in Regelungsnormalform (RNF)<br />
⎡<br />
⎤<br />
0 1 0 ... ... 0<br />
0 0 1 0 ... 0<br />
.<br />
A =<br />
. .. . .. . .. .<br />
∈ R n×n (49)<br />
⎢ 0 ... ... 0 1 0<br />
⎥<br />
⎣ 0 ... ... ... 0 1 ⎦<br />
−a 0 −a 1 ... ... ... −a n−1<br />
– dem Steuer-/Einkoppelvektor b = ( 0, ..., 0, V S<br />
) ⊤<br />
∈ R<br />
n<br />
– dem Auskoppel-/Ausgangsvektor c ⊤ = ( c 0 , c 1 , ..., c n−1<br />
)<br />
∈ R<br />
n<br />
• Übertragungsfunktion (aus Regelungsnormalform)<br />
Darstellung im Laplace-Bereich mit s = σ +iω ∈ C ergibt<br />
F S (s) = y(s)<br />
u(s) = c⊤ (sI n −A) −1 c 0 +c 1 s+···+c n−1 s n−1<br />
b = V S<br />
(50)<br />
a 0 +a 1 s+···+a n−1 s n−1 +s n<br />
• Stabilität eines LTI Systems in Zustandsdarstellung (47)<br />
Ein System der Form (47) ist<br />
– <strong>für</strong> jeden Anfangswert x 0 ∈ R n (exponentiell) stabil und<br />
– <strong>für</strong> jeden Anfangswertx 0 ∈ R n und jeden beschränkten Eingangu(·) bounded-input,<br />
bounded-output (BIBO) stabil,<br />
wenn alle Eigenwerte λ 1 ,...,λ n ∈ C der Matrix A negativen Realteil besitzen, d.h.<br />
R{λ i } < 0 <strong>für</strong> alle i ∈ {1,...,n}. Die Eigenwerte können durch Nullsetzen der charakteristischen<br />
[ Gleichung χ A (s) := det(sI n − A) = 0 bestimmt werden. Hierbei entspricht<br />
1<br />
.<br />
I n = .. ∈ R<br />
1]<br />
n×n der Einheitsmatrix der Ordnung n. Die Eigenwerte λ i sind identisch<br />
mit den Polen der Übertragungsfunktion (49).<br />
— Seite 7/12 —
Regelung von regenerativen Energiesystemen<br />
<strong>Formelsammlung</strong> (WS13/14)<br />
Technische Universität München, Christoph Hackl <strong>Stand</strong> 26. 11. 2013<br />
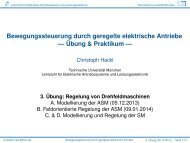
5 Grundlagen zu Drehfeldmaschinen (siehe [5] und [6])<br />
Wichtige Grundlage zum Verständnis von Drehfeldmaschinen ist die Zeigertheorie (engl. space<br />
vector theory). Hierzu siehe Abbildung 1.<br />
u<br />
v<br />
w<br />
q<br />
q ′<br />
i q′<br />
s<br />
i β s<br />
β<br />
ω s = ˙φ s<br />
i s = i s s<br />
d<br />
ω k = ˙φ k<br />
i d s<br />
b<br />
i q s<br />
b<br />
φ s<br />
φ k<br />
i d′<br />
s<br />
d ′<br />
ω r = ˙φ r<br />
c<br />
b r<br />
c r<br />
a r<br />
a<br />
b r<br />
c<br />
c r<br />
i α s<br />
a r<br />
a<br />
φ r<br />
α<br />
Abbildung 1: Zeigertheorie: Maschine mit Anschlussklemmen u, v, w, Stator-Wicklungen a, b, c und<br />
Rotor-Wicklungen a r , b r , c r (links) und unterschiedliche Koordinatensysteme (rechts):<br />
• 3-phasiges Koordinatensystem (a,b,c),<br />
• statorfestes s-Koordinatensystem (α,β),<br />
• rotorfestes r-Koordinatensystem (d ′ ,q ′ ) und<br />
• beliebiges k-Koordinatensystem (d,q)<br />
und Statorstrom i s mit Länge ‖i s ‖ = ‖i s s‖ =<br />
√<br />
(i α s) 2 +(i β s) 2 = ‖is‖ r = ∥ ∥i s<br />
k ∥ mit entsprechenden<br />
Komponenten (z.B. i α s und i β s im Stator-Koordinatensystem).<br />
• Clarke-Transformation von Stranggrößen x abc in Statorgrößen x s = T C x abc mit<br />
T C : R 3 → R 3 ,<br />
⎡<br />
⎛ ⎞ ⎛ ⎞ 1 − 1<br />
x a x α<br />
⎝x b ⎠ ↦→ ⎝x β ⎠ := 2 2<br />
− 1 ⎤<br />
2 ⎛ ⎞<br />
⎢0 √ 3<br />
x c x 0 3 ⎣ 2<br />
− √ x a<br />
3<br />
⎥⎝x b ⎠ (51)<br />
2 ⎦<br />
x c<br />
} {{ } } {{ } 1 1 1<br />
=:x abc =:x s }<br />
2 2<br />
{{<br />
2<br />
}<br />
=:T C ∈R 3×3<br />
[Analogie zu D. Schröder: a 0 := e j0◦ = 1, a 1 := e j120◦ , a 2 := e j240◦ ]<br />
— Seite 8/12 —
Regelung von regenerativen Energiesystemen<br />
<strong>Formelsammlung</strong> (WS13/14)<br />
Technische Universität München, Christoph Hackl <strong>Stand</strong> 26. 11. 2013<br />
wobei x ∈ {ψ r , ψ s , u r , i s , ...}. T C ist regulär mit inverser Matrix<br />
⎡ ⎤<br />
1 0 1<br />
C = ⎢<br />
⎣− 1 √<br />
3<br />
2 2<br />
1⎥<br />
⎦ , d.h. xabc = T −1<br />
− 1 2<br />
− √ 3<br />
2<br />
1<br />
T −1<br />
C xs . (52)<br />
Oft wird die Nullkomponente x 0 vernachlässigt (z.B. gilt i 0 = 0 = i a +i b +i c bei Sternschaltung),<br />
dann vereinfachen sich die Clarke-Transformationsmatrizen zu<br />
⎡ ⎤<br />
[ ]<br />
1 0<br />
T C = 2 1 −<br />
1<br />
− 1 2 2<br />
√<br />
3 0 3<br />
− √ ∈ R 2×3 und T −1<br />
3<br />
C = ⎢<br />
⎣− 1 √<br />
3<br />
⎥<br />
2 2 ⎦ ∈ R3×2 .<br />
2 2<br />
− 1 − √ 3<br />
2 2<br />
• Park-Transformation von Statorgrößen x s in beliebig umlaufendes Koordinatensystem<br />
(z.B. rotorfestes (d ′ ,q ′ )-KoSy oder rotorflussfestes (d,q)-KoSy)<br />
Zur Vereinfachung wird die Nullkomponente (zero-sequence) x 0 in Statorgrößen vernachlässigt<br />
[ ]<br />
cos(φ) −sin(φ)<br />
T P : R → R 2×2 , φ ↦→ T P (φ) :=<br />
[Analogie zu D. Schröder: e jφ ]<br />
sin(φ) cos(φ)<br />
(53)<br />
wobei T P (φ) regulär <strong>für</strong> alle φ ∈ R mit inverser Matrix<br />
[ ]<br />
cos(φ) sin(φ)<br />
T P (φ) −1 = = T P (φ) ⊤ = T P (−φ). [Analogie zu D. Schröder: e −jφ ]<br />
−sin(φ) cos(φ)<br />
(54)<br />
Es gilt entsprechend<br />
[ ]<br />
cos(φ) −sin(φ)<br />
T P (−φ) −1 = = T P (−φ) ⊤ = T P (φ). (55)<br />
sin(φ) cos(φ)<br />
Mithilfe der trigonometrischen Sätze folgt<br />
∀φ 1 ,φ 2 ∈ R: T P (φ 1 )·T P (φ 2 ) = T P (φ 1 +φ 2 ). [Analogie zu D. Schröder: e j(φ 1+φ 2 ) ]<br />
(56)<br />
Für φ = π/2 gilt<br />
[ ]<br />
( π<br />
) 0 −1<br />
J := T P = ,<br />
2 1 0<br />
[Analogie zu D. Schröder: e j π 2 ] (57)<br />
was einer (positiven) Drehung um π/2 eines Vektors x ∈ R 2 entspricht.<br />
— Seite 9/12 —
Regelung von regenerativen Energiesystemen<br />
<strong>Formelsammlung</strong> (WS13/14)<br />
Technische Universität München, Christoph Hackl <strong>Stand</strong> 26. 11. 2013<br />
Die Matrizen J und T P (φ) kommutieren, d.h.<br />
[ ]<br />
−sin(φ) −cos(φ)<br />
∀φ ∈ R: JT P (φ) = = T P (φ)J, (58)<br />
cos(φ) −sin(φ)<br />
Für d dt<br />
und<br />
φ =: ω gilt<br />
[Analogie zu D. Schröder: e j(π 2 +φ) = e j(φ+π 2 ) = je jφ ].<br />
[ ]<br />
Ṫ P (φ) := d −sin(φ) −cos(φ)<br />
dt T P(φ) = ω = ωJT P (φ) = ωT P (φ)J (59)<br />
cos(φ) −sin(φ)<br />
[Analogie zu D. Schröder:<br />
Ṫ P (φ) −1 := d dt T P(φ) −1 = ω<br />
[Analogie zu D. Schröder:<br />
[<br />
−sin(φ) cos(φ)<br />
d<br />
dt ejφ = jωe jφ = e j(π 2 +φ) = ωe j(φ+π 2 ) ]<br />
−cos(φ) −sin(φ)<br />
]<br />
d<br />
dt e−jφ = −jωe −jφ ]<br />
= −ωJT P (φ) −1 = −ωT P (φ) −1 J<br />
Mit der Konvention φ k = φ lässt sich mithilfe der Park-Transformation T P (φ k ) ausgehend<br />
von einem statorfesten Koordinatensystem (α,β) in ein (beliebiges) umlaufendes<br />
k-Koordinatensystem (d,q) (Superskript x k = (x d , x q ) ⊤ ) übergegangen werden<br />
(60)<br />
x k = T P (−φ k )x s = T P (φ k ) −1 x s =⇒ x s = T P (φ k )x k , (61)<br />
z.B. zur Rotorfluss-Orientierung (d.h. ψr q = ˙ψ r q = 0 und ψr d = ‖ψr‖ r = ∥ ∥<br />
∥ψ k r<br />
∥, der<br />
Rotorfluss im k-Koordinatensystem liegt ‘exakt’ auf der d-Achse).<br />
— Seite 10/12 —
Optimierungstabelle<br />
y ref<br />
′<br />
y<br />
ref,0<br />
′<br />
✻<br />
1<br />
Führungsgröße<br />
z<br />
z 0<br />
✻<br />
1<br />
Störgröße<br />
— Seite 11/12 —<br />
z F S<br />
y ′ { }} {<br />
y ref ref<br />
✲ ✲ ❡ ✲ ✲ ❄<br />
F R<br />
❡−<br />
y<br />
F G<br />
✲F Sσ<br />
✲F S1<br />
✲F S2<br />
✲<br />
✻−<br />
Führungsglättung<br />
Regler Strecke<br />
Strecke<br />
Regler<br />
y<br />
y ′ ref,0<br />
y ∞<br />
y ′ ref,0<br />
0<br />
✻<br />
1<br />
0<br />
t an<br />
t aus<br />
✲<br />
t<br />
y max<br />
y ′ ref,0 ±2%<br />
✲<br />
t<br />
0<br />
y<br />
y max<br />
V S z 0 ✻<br />
y<br />
V S z 0 ∞<br />
V S z 0<br />
0<br />
❩<br />
❩ Wendetangente<br />
❩<br />
❩<br />
Verhalten bei Sprung der<br />
Einstellung<br />
Führungsgröße y ref (bzw. y<br />
ref ′ ) Störgröße z Nr.<br />
Günstiger<br />
Opt.<br />
Nr. Typ F S Typ F R t an t aus y max y ∞ T ers t an 1 y max 1 y ∞<br />
Bereich Krit. T n V R T v T G (±2%)<br />
T σ T σ y<br />
ref,0<br />
′ y<br />
ref,0<br />
′ T σ T σ V S z 0 V S z 0<br />
V S<br />
1<br />
1<br />
1 PT 1 beliebig I V R BO — — — 4,7 8,4 1,04 1 2 6,3 0,64 0 1<br />
1+sT σ s 2T σ V S<br />
( )<br />
T 1<br />
2<br />
≫ 1 P V R BO — T 1<br />
— — (4,7) (8,4) 1,04 y ∞ V R V S<br />
1 1<br />
T σ 2T σ V S y ′ 2 (4,7) ≈<br />
2<br />
ref,0<br />
1+V R V S 1+V R V S 1+V R V S<br />
√<br />
V S T 1 1+sT n T 1<br />
T1 0,5...1,2<br />
3 PT 2 > 1 PI V R BO T 1 — — 4,7 8,4 1,04 1 2 5,5<br />
0 3<br />
(1+sT 1 )(1+sT σ ) T σ sT n 2T σ V S T σ T 1 /T σ<br />
T 1 1+sT n T 1<br />
— 3,1 ... 4,7 8,4 ... 16,5 1,04 ... 1,43 1 — 1,2...1,6<br />
4<br />
≥ 4 PI V R SO 4T σ — ≈ 10<br />
0 4<br />
T σ sT n 2T σ V S 0..4Tσ 4,7 ... 7,6 8,4 ... 13,3 1,04 ... 1,08 1 2 ... 4 T 1 /T σ<br />
( )<br />
T 1<br />
5<br />
≫ 1 PD V R (1+sT v ) BO — T 1<br />
T 2 — (4,7) (8,4) 1,04 y ∞ V R V S<br />
T σ 2T σ V S y ′ 2 4+ T 2 1 1<br />
≈<br />
5<br />
ref,0<br />
1+V R V S T σ 1+V R V S 1+V R V S<br />
√<br />
V S T 1 (1+sT n )(1+sT v ) T 1<br />
T 1 T 2 0,5...0,75<br />
6 PT 3 > 1 PID V R BO T 1 T 2 — 4,7 8,4 1,04 1 2 4,4 √ √<br />
(1+sT 1 )(1+sT 2 )(1+sT σ ) T σ sT n 2T σ V S T 2 0 6<br />
σ T1 /T σ T2 /T σ<br />
√<br />
T 1 (1+sT n )(1+sT v ) T 1<br />
— 3,1 ... 4,7 8,4 ... 16,5 1,04 ... 1,43 1 — T2 1,4...1,8<br />
7 T 2 > T σ ≥ 4 PID V R SO 4T σ T 2 ≈ 10 4 √ 0 7<br />
T σ sT n 2T σ V S 0..4Tσ 4,7 ... 7,6 8,4 ... 13,3 1,04 ... 1,08 1 2 ... 4 T σ T 1 /T σ T2 /T σ<br />
T 1<br />
8<br />
≫ 1 P V R BO — T 1<br />
— — 4,7 8,4 1,04 1 2 (4,7) ≈ 1 1<br />
8<br />
V<br />
V S T σ 2T σ V S V R V S V R V S S<br />
IT 1<br />
sT 1 (1+sT σ ) 1+sT n T 1<br />
— 3,1 16,5 1,43 1 —<br />
1,6<br />
9 beliebig PI V R SO 4T σ — 10<br />
0 9<br />
sT n 2T σ V S 4Tσ 7,6 13,3 1,08 1 4<br />
T 1 /T σ<br />
T 1<br />
10<br />
≫ 1 PD V R (1+sT v ) BO — T 1<br />
T 2 — 4,7 8,4 1,04 1 2 4+ T 2<br />
≈ 1 1<br />
10<br />
V<br />
V S T σ 2T σ V S T σ V R V S V R V S S<br />
IT 2<br />
√<br />
sT 1 (1+sT 2 )(1+sT σ ) (1+sT n )(1+sT v ) T 1<br />
— 3,1 16,5 1,43 1 — T2 1,8<br />
11<br />
beliebig PID V R SO 4T σ T 2 ≈ 10 4 √ 0 11<br />
T 2 > T σ sT n 2T σ V S 4T σ 7,6 13,3 1,08 1 4 T σ T 1 /T σ T2 /T σ<br />
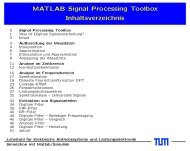
Abbildung 2: Optimierungstabelle <strong>für</strong> exakt bekannte Strecken mit Ordnung n ≤ 3 und rein reellen Polen<br />
(T 1 , T 2 ...große Zeitkonstanten, T σ ...kleine (Ersatz-)Zeitkonstante).<br />
t an<br />
✲<br />
t<br />
✲<br />
t<br />
Technische Universität München, Christoph Hackl <strong>Stand</strong> 26. 11. 2013<br />
Regelung von regenerativen Energiesystemen <strong>Formelsammlung</strong> (WS13/14)
Regelung von regenerativen Energiesystemen<br />
<strong>Formelsammlung</strong> (WS13/14)<br />
Technische Universität München, Christoph Hackl <strong>Stand</strong> 26. 11. 2013<br />
Literatur<br />
[1] L. Råde, B. Westergren, and P. Vachenauer, Springers mathematische Formeln: Taschenbuch<br />
<strong>für</strong> Ingenieure, Naturwissenschaftler, Informatiker, Wirtschaftswissenschaftler.<br />
Springer-Verlag, 3. ed., 2000.<br />
[2] K. Mertens, Photovoltaik. Hanser Verlag, 2013.<br />
[3] V. Quaschning, Regenerative Energiesysteme. Hanser Verlag, 2011.<br />
[4] R. Kories and H. Schmidt-Walter, Taschenbuch der Elektrotechnik. Verlag Harri Deutsch,<br />
1998.<br />
[5] D. Schröder, Elektrische Antriebe — Grundlagen (3.,erw. Auflage). Springer-Verlag, 2007.<br />
[6] D. Schröder, Elektrische Antriebe - Regelung von Antriebssystemen (3., bearb. Auflage).<br />
Berlin: Springer-Verlag, 2009.<br />
[7] D. Hinrichsen and A. Pritchard, Mathematical Systems Theory I — Modelling, State Space<br />
Analysis, Stability and Robustness. No. 48 in Texts in Applied Mathematics, Berlin:<br />
Springer-Verlag, 2005.<br />
— Seite 12/12 —