Download - Fakultät 06 - Hochschule München
Download - Fakultät 06 - Hochschule München
Download - Fakultät 06 - Hochschule München

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
1.2 M=BUS 4<br />
produziert. Das Problem der ersten Dummys war, das keine einheitliche Produktion möglich<br />
war.<br />
Deshalb konnten auch keine vergleichbaren Messergebnisse gesammelt werden. Der nächste<br />
Schritt auf der Leiter zu den heutigen Dummys war 1968 der Hybrid I von GM, der viele<br />
der Probleme der bisherigen Dummys ausmerzen konnte.<br />
Es wurde dann auch der Hybird II und der Hybrid III entwickelt,<br />
wobei der Hybrid III auch noch heute verwendet wird.<br />
Dazu kamen noch mehrere andere Dummys, da die genannten<br />
nur für den Frontalaufprall geeignet sind. Im Gegensatz zu den<br />
ersten Dummys, die nur drei Beschleunigungssensoren verbaut<br />
hatten sind die aktuellen Dummys mit unzähligen Sensoren<br />
bestückt. Dazu gehören auch Kraft- und Momentaufnehmer<br />
um z.B. den Druck auf die Rippen des Dummys und deren<br />
Verdrehung zu messen.<br />
Die Dummys werden in<br />
• Frontal Impact Dummys,<br />
• Side Impact Dummys (SID) und<br />
• Rear Impact Dummys (RID)<br />
unterteilt. Zudem werden die Dummys noch aufgrund ihres<br />
Geschlechtes, ihres Alters und des Gewichts unterschieden. [10,<br />
11]<br />
1.2 M=BUS<br />
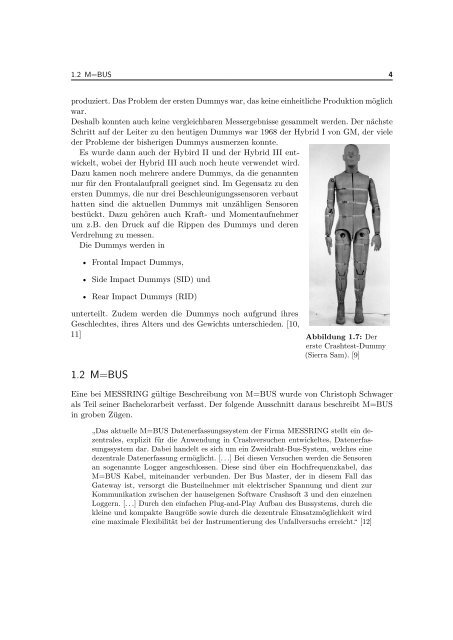
Abbildung 1.7: Der<br />
erste Crashtest-Dummy<br />
(Sierra Sam). [9]<br />
Eine bei MESSRING gültige Beschreibung von M=BUS wurde von Christoph Schwager<br />
als Teil seiner Bachelorarbeit verfasst. Der folgende Ausschnitt daraus beschreibt M=BUS<br />
in groben Zügen.<br />
„Das aktuelle M=BUS Datenerfassungssystem der Firma MESSRING stellt ein dezentrales,<br />
explizit für die Anwendung in Crashversuchen entwickeltes, Datenerfassungssystem<br />
dar. Dabei handelt es sich um ein Zweidraht-Bus-System, welches eine<br />
dezentrale Datenerfassung ermöglicht. [. . .] Bei diesen Versuchen werden die Sensoren<br />
an sogenannte Logger angeschlossen. Diese sind über ein Hochfrequenzkabel, das<br />
M=BUS Kabel, miteinander verbunden. Der Bus Master, der in diesem Fall das<br />
Gateway ist, versorgt die Busteilnehmer mit elektrischer Spannung und dient zur<br />
Kommunikation zwischen der hauseigenen Software Crashsoft 3 und den einzelnen<br />
Loggern. [. . .] Durch den einfachen Plug-and-Play Aufbau des Bussystems, durch die<br />
kleine und kompakte Baugröße sowie durch die dezentrale Einsatzmöglichkeit wird<br />
eine maximale Flexibilität bei der Instrumentierung des Unfallversuchs erreicht.“ [12]