ColSim - Simulation von Regelungssystemen in ... - OptiControl
ColSim - Simulation von Regelungssystemen in ... - OptiControl
ColSim - Simulation von Regelungssystemen in ... - OptiControl

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
100 KAPITEL 5. REGELUNG VON SOLAREN BRAUCHWASSERSYSTEMEN<br />
Fuzzyfication<br />
Inferenz<br />
Defuzzyfication<br />
e1<br />
1<br />
s<br />
<strong>in</strong>p1<br />
<strong>in</strong>p2<br />
l<strong>in</strong>guistische Terme<br />
SET 1<br />
Wissensbasis: IF .. THEN<br />
Low<br />
Erfüllungsgrad<br />
Flächenschwerpunkt<br />
1/s<br />
<strong>in</strong>p3<br />
SET 2<br />
Medium<br />
out<br />
e2<br />
e3<br />
<strong>in</strong>p4<br />
<strong>in</strong>p5<br />
SET 3<br />
High<br />
OUT SET<br />
’scharfe’ Ausgangsgröße<br />
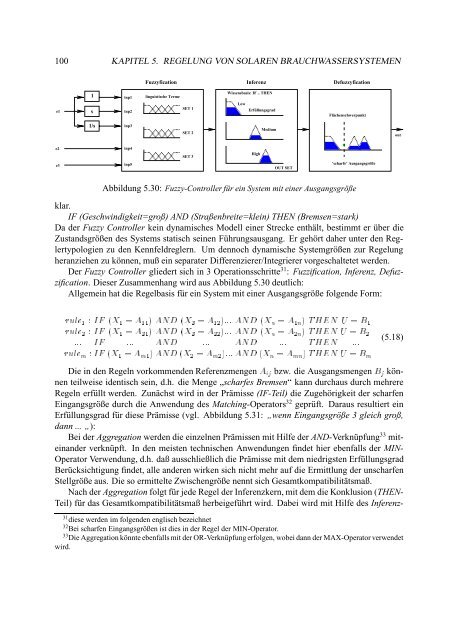
Abbildung 5.30: Fuzzy-Controller für e<strong>in</strong> System mit e<strong>in</strong>er Ausgangsgröße<br />
klar.<br />
IF (Geschw<strong>in</strong>digkeit=groß) AND (Straßenbreite=kle<strong>in</strong>) THEN (Bremsen=stark)<br />
Da der Fuzzy Controller ke<strong>in</strong> dynamisches Modell e<strong>in</strong>er Strecke enthält, bestimmt er über die<br />
Zustandsgrößen des Systems statisch se<strong>in</strong>en Führungsausgang. Er gehört daher unter den Reglertypologien<br />
zu den Kennfeldreglern. Um dennoch dynamische Systemgrößen zur Regelung<br />
heranziehen zu können, muß e<strong>in</strong> separater Differenzierer/Integrierer vorgeschaltetet werden.<br />
Der Fuzzy Controller gliedert sich <strong>in</strong> 3 Operationsschritte 31 : Fuzzification, Inferenz, Defuzzification.<br />
Dieser Zusammenhang wird aus Abbildung 5.30 deutlich:<br />
Allgeme<strong>in</strong> hat die Regelbasis für e<strong>in</strong> System mit e<strong>in</strong>er Ausgangsgröße folgende Form:<br />
rule 1 : IF (X 1 = A 11 ) AND (X 2 = A 12 )::: AND (X n = A 1n ) THEN U = B 1<br />
rule 2 : IF (X 1 = A 21 ) AND (X 2 = A 22 )::: AND (X n = A 2n ) THEN U = B 2<br />
(5.18)<br />
::: IF ::: AND ::: AND ::: THEN :::<br />
rule m : IF (X 1 = A m1 ) AND (X 2 = A m2 )::: AND (X n = A mn ) THEN U = B m<br />
Die <strong>in</strong> den Regeln vorkommenden Referenzmengen A ij bzw. die Ausgangsmengen B j können<br />
teilweise identisch se<strong>in</strong>, d.h. die Menge „scharfes Bremsen“ kann durchaus durch mehrere<br />
Regeln erfüllt werden. Zunächst wird <strong>in</strong> der Prämisse (IF-Teil) die Zugehörigkeit der scharfen<br />
E<strong>in</strong>gangsgröße durch die Anwendung des Match<strong>in</strong>g-Operators 32 geprüft. Daraus resultiert e<strong>in</strong><br />
Erfüllungsgrad für diese Prämisse (vgl. Abbildung 5.31: „wenn E<strong>in</strong>gangsgröße 3 gleich groß,<br />
dann ... „):<br />
Bei der Aggregation werden die e<strong>in</strong>zelnen Prämissen mit Hilfe der AND-Verknüpfung 33 mite<strong>in</strong>ander<br />
verknüpft. In den meisten technischen Anwendungen f<strong>in</strong>det hier ebenfalls der MIN-<br />
Operator Verwendung, d.h. daß ausschließlich die Prämisse mit dem niedrigsten Erfüllungsgrad<br />
Berücksichtigung f<strong>in</strong>det, alle anderen wirken sich nicht mehr auf die Ermittlung der unscharfen<br />
Stellgröße aus. Die so ermittelte Zwischengröße nennt sich Gesamtkompatibilitätsmaß.<br />
Nach der Aggregation folgt für jede Regel der Inferenzkern, mit dem die Konklusion (THEN-<br />
Teil) für das Gesamtkompatibilitätsmaß herbeigeführt wird. Dabei wird mit Hilfe des Inferenz-<br />
31 diese werden im folgenden englisch bezeichnet<br />
32 Bei scharfen E<strong>in</strong>gangsgrößen ist dies <strong>in</strong> der Regel der MIN-Operator.<br />
33 Die Aggregation könnte ebenfalls mit der OR-Verknüpfung erfolgen, wobei dann der MAX-Operator verwendet<br />
wird.