ColSim - Simulation von Regelungssystemen in ... - OptiControl
ColSim - Simulation von Regelungssystemen in ... - OptiControl
ColSim - Simulation von Regelungssystemen in ... - OptiControl

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
24 KAPITEL 3. DIE SIMULATIONSUMGEBUNG COLSIM<br />
*<br />
*<br />
*- xfig-generated ’dek’ Christof Wittwer/ISE<br />
*<br />
UNIT 1 TYPE 62 --- SIMCONTROL -----<br />
PARAMS 7<br />
* 1: [] 0802 date_start (year/month/day)<br />
940802<br />
* 2: [] date_stop (year/month/day)<br />
941231<br />
* 3: [] time_start (hour/m<strong>in</strong>ute/sec)<br />
0<br />
* 4: [] time_stop (hour/m<strong>in</strong>ute/sec)<br />
235959<br />
* 5: [] max_error<br />
1000<br />
* 6: [] unix_flag<br />
1<br />
* 7: [s] simulation time step<br />
10<br />
*<br />
UNIT 2 TYPE 11 -- DIVERTER ------<br />
PARAMS 1<br />
* 1: [] mode 1: T_piece<br />
1<br />
INPUTS 3<br />
* 1: deltaQ-<strong>in</strong>let<br />
12, 1<br />
* 2: mp-<strong>in</strong>let<br />
12, 2<br />
* 3: ctr 0:out1 1:out3<br />
4, 3<br />
* INPUT INITIAL VALUES<br />
* 1:<br />
0<br />
* 2:<br />
0<br />
* 3:<br />
0<br />
**<br />
UNIT 3 TYPE 31 ---- PIPE_9 ---------<br />
PARAMS 4<br />
* 1: [m] length l of pipe<br />
10<br />
* 2: [mm] <strong>in</strong>side diameter diameter<br />
16<br />
* 3: [kJ/kgK] cp fluid (water)<br />
4.19<br />
* 4: [W/Km] kA/l<br />
0.4<br />
INPUTS 4<br />
* 1: deltaQ-<strong>in</strong>let<br />
21, 1<br />
* 2: mp-<strong>in</strong>let<br />
21, 2<br />
* 3: ambient temperature<br />
0, 0<br />
* 4: external ga<strong>in</strong><br />
0, 0<br />
* INPUT INITIAL VALUES<br />
* 1:<br />
0<br />
* 2:<br />
0<br />
* 3:<br />
18<br />
* 4:<br />
0<br />
*<br />
DERIVATIVES 1<br />
* 1: [C]<br />
18<br />
*<br />
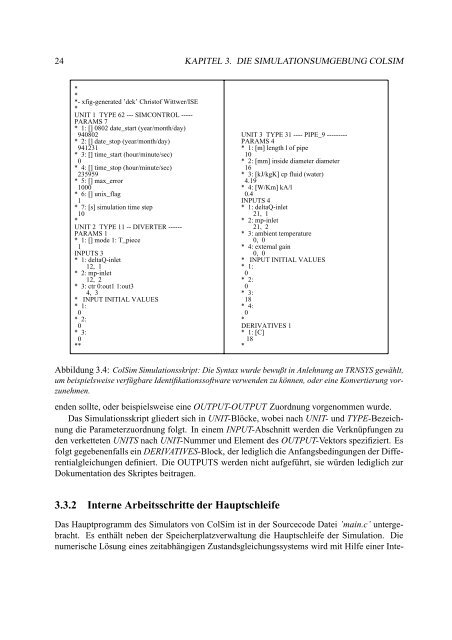
Abbildung 3.4: <strong>ColSim</strong> <strong>Simulation</strong>sskript: Die Syntax wurde bewußt <strong>in</strong> Anlehnung an TRNSYS gewählt,<br />
um beispielsweise verfügbare Identifikationssoftware verwenden zu können, oder e<strong>in</strong>e Konvertierung vorzunehmen.<br />
enden sollte, oder beispielsweise e<strong>in</strong>e OUTPUT-OUTPUT Zuordnung vorgenommen wurde.<br />
Das <strong>Simulation</strong>sskript gliedert sich <strong>in</strong> UNIT-Blöcke, wobei nach UNIT- und TYPE-Bezeichnung<br />
die Parameterzuordnung folgt. In e<strong>in</strong>em INPUT-Abschnitt werden die Verknüpfungen zu<br />
den verketteten UNITS nach UNIT-Nummer und Element des OUTPUT-Vektors spezifiziert. Es<br />
folgt gegebenenfalls e<strong>in</strong> DERIVATIVES-Block, der lediglich die Anfangsbed<strong>in</strong>gungen der Differentialgleichungen<br />
def<strong>in</strong>iert. Die OUTPUTS werden nicht aufgeführt, sie würden lediglich zur<br />
Dokumentation des Skriptes beitragen.<br />
3.3.2 Interne Arbeitsschritte der Hauptschleife<br />
Das Hauptprogramm des Simulators <strong>von</strong> <strong>ColSim</strong> ist <strong>in</strong> der Sourcecode Datei ’ma<strong>in</strong>.c’ untergebracht.<br />
Es enthält neben der Speicherplatzverwaltung die Hauptschleife der <strong>Simulation</strong>. Die<br />
numerische Lösung e<strong>in</strong>es zeitabhängigen Zustandsgleichungssystems wird mit Hilfe e<strong>in</strong>er Inte-