Entwicklung und Implementierung von Heuristiken zur optimierten ...
Entwicklung und Implementierung von Heuristiken zur optimierten ...
Entwicklung und Implementierung von Heuristiken zur optimierten ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
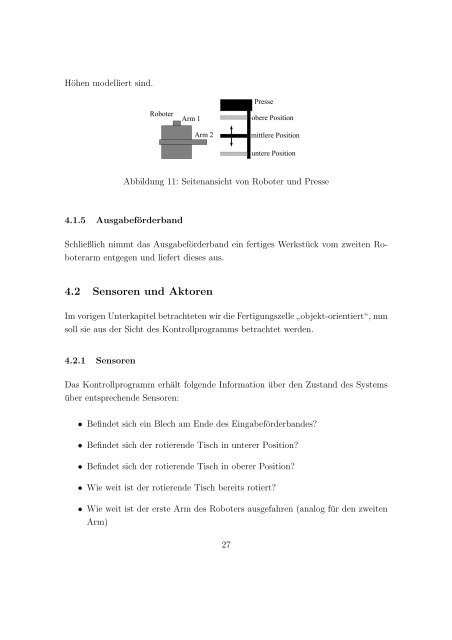
Höhen modelliert sind.<br />
Abbildung 11: Seitenansicht <strong>von</strong> Roboter <strong>und</strong> Presse<br />
4.1.5 Ausgabeförderband<br />
Schließlich nimmt das Ausgabeförderband ein fertiges Werkstück vom zweiten Roboterarm<br />
entgegen <strong>und</strong> liefert dieses aus.<br />
4.2 Sensoren <strong>und</strong> Aktoren<br />
Im vorigen Unterkapitel betrachteten wir die Fertigungszelle ”<br />
objekt-orientiert“, nun<br />
soll sie aus der Sicht des Kontrollprogramms betrachtet werden.<br />
4.2.1 Sensoren<br />
Das Kontrollprogramm erhält folgende Information über den Zustand des Systems<br />
über entsprechende Sensoren:<br />
• Befindet sich ein Blech am Ende des Eingabeförderbandes?<br />
• Befindet sich der rotierende Tisch in unterer Position?<br />
• Befindet sich der rotierende Tisch in oberer Position?<br />
• Wie weit ist der rotierende Tisch bereits rotiert?<br />
• Wie weit ist der erste Arm des Roboters ausgefahren (analog für den zweiten<br />
Arm)<br />
27