Entwicklung und Implementierung von Heuristiken zur optimierten ...
Entwicklung und Implementierung von Heuristiken zur optimierten ...
Entwicklung und Implementierung von Heuristiken zur optimierten ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
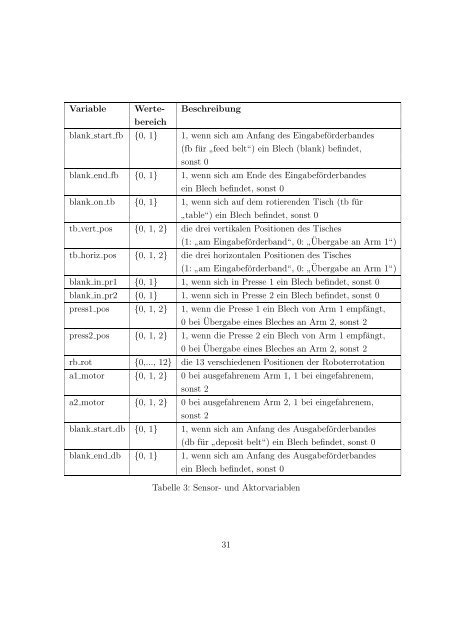
Variable Werte- Beschreibung<br />
bereich<br />
blank start fb {0, 1} 1, wenn sich am Anfang des Eingabeförderbandes<br />
(fb für ”<br />
feed belt“) ein Blech (blank) befindet,<br />
sonst 0<br />
blank end fb {0, 1} 1, wenn sich am Ende des Eingabeförderbandes<br />
ein Blech befindet, sonst 0<br />
blank on tb {0, 1} 1, wenn sich auf dem rotierenden Tisch (tb für<br />
table“) ein Blech befindet, sonst 0<br />
”<br />
tb vert pos {0, 1, 2} die drei vertikalen Positionen des Tisches<br />
(1: ”<br />
am Eingabeförderband“, 0: ” Übergabe an Arm 1“)<br />
tb horiz pos {0, 1, 2} die drei horizontalen Positionen des Tisches<br />
(1: ”<br />
am Eingabeförderband“, 0: ” Übergabe an Arm 1“)<br />
blank in pr1 {0, 1} 1, wenn sich in Presse 1 ein Blech befindet, sonst 0<br />
blank in pr2 {0, 1} 1, wenn sich in Presse 2 ein Blech befindet, sonst 0<br />
press1 pos {0, 1, 2} 1, wenn die Presse 1 ein Blech <strong>von</strong> Arm 1 empfängt,<br />
0 bei Übergabe eines Bleches an Arm 2, sonst 2<br />
press2 pos {0, 1, 2} 1, wenn die Presse 2 ein Blech <strong>von</strong> Arm 1 empfängt,<br />
0 bei Übergabe eines Bleches an Arm 2, sonst 2<br />
rb rot {0,..., 12} die 13 verschiedenen Positionen der Roboterrotation<br />
a1 motor {0, 1, 2} 0 bei ausgefahrenem Arm 1, 1 bei eingefahrenem,<br />
sonst 2<br />
a2 motor {0, 1, 2} 0 bei ausgefahrenem Arm 2, 1 bei eingefahrenem,<br />
sonst 2<br />
blank start db {0, 1} 1, wenn sich am Anfang des Ausgabeförderbandes<br />
(db für ”<br />
deposit belt“) ein Blech befindet, sonst 0<br />
blank end db {0, 1} 1, wenn sich am Anfang des Ausgabeförderbandes<br />
ein Blech befindet, sonst 0<br />
Tabelle 3: Sensor- <strong>und</strong> Aktorvariablen<br />
31