12 Einfache mechanische Systeme - THEP Mainz
12 Einfache mechanische Systeme - THEP Mainz
12 Einfache mechanische Systeme - THEP Mainz

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
eplacements<br />
(d)<br />
ω<br />
ϑ<br />
ℓ<br />
m<br />
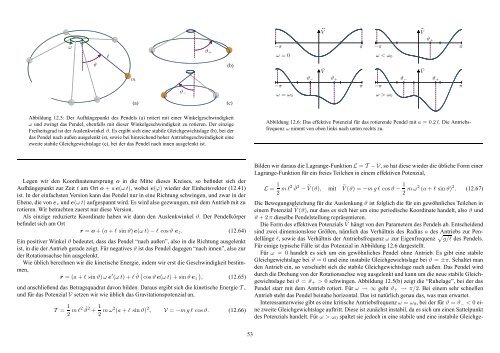
Abbildung <strong>12</strong>.5: Der Aufhängepunkt des Pendels (a) rotiert mit einer Winkelgeschwindigkeit<br />
ω und zwingt das Pendel, ebenfalls mit dieser Winkelgeschwindigkeit zu rotieren. Der einzige<br />
Freiheitsgrad ist der Auslenkwinkel ϑ. Es ergibt sich eine stabile Gleichgewichtslage (b), bei der<br />
das Pendel nach außen ausgelenkt ist, sowie bei hinreichend hoher Antriebsgeschwindigkeit eine<br />
zweite stabile Gleichgewichtslage (c), bei der das Pendel nach innen ausgelenkt ist.<br />
Legen wir den Koordinatenursprung o in die Mitte dieses Kreises, so befindet sich der<br />
Aufhängepunkt zur Zeit t am Ort o + a e(ω t), wobei e(ϕ) wieder der Einheitsvektor (<strong>12</strong>.41)<br />
ist. In der einfachsten Version kann das Pendel nur in eine Richtung schwingen, und zwar in der<br />
Ebene, die von ez und e(ω t) aufgespannt wird. Es wird also gezwungen, mit dem Antrieb mit zu<br />
rotieren. Wir betrachten zuerst nur diese Version.<br />
Als einzige reduzierte Koordinate haben wir dann den Auslenkwinkel ϑ. Der Pendelkörper<br />
befindet sich am Ort<br />
r = o + (a + ℓ sin ϑ) e(ω t) − ℓ cos ϑ ez. (<strong>12</strong>.64)<br />
Ein positiver Winkel ϑ bedeutet, dass das Pendel “nach außen”, also in die Richtung ausgelenkt<br />
ist, in die der Antrieb gerade zeigt. Für negatives ϑ ist das Pendel dagegen “nach innen”, also zur<br />
der Rotationsachse hin ausgelenkt.<br />
Wie üblich berechnen wir die kinetische Energie, indem wir erst die Geschwindigkeit bestim-<br />
men,<br />
(a)<br />
˙r = (a + ℓ sin ϑ) ω e ′ (ω t) + ℓ ˙ ϑ � �<br />
cos ϑ e(ω t) + sin ϑ ez , (<strong>12</strong>.65)<br />
und anschließend das Betragsquadrat davon bilden. Daraus ergibt sich die kinetische Energie T ,<br />
und für das Potenzial V setzen wir wie üblich das Gravitationspotenzial an,<br />
T = 1<br />
2 m ℓ2 ˙ ϑ 2 + 1<br />
2 m ω2 (a + ℓ sin ϑ) 2 , V = −m g ℓ cos ϑ. (<strong>12</strong>.66)<br />
ϑ−<br />
ϑ+<br />
(b)<br />
(c)<br />
53<br />
(a)<br />
(b)<br />
(c)<br />
(d)<br />
−π<br />
V<br />
ω = 0 ω < ω0<br />
−π<br />
ω = ω0<br />
V<br />
π<br />
π<br />
−π<br />
−π<br />
ω > ω0<br />
V<br />
V<br />
ϑ+<br />
ϑ− ϑ+ ϑ− ϑ+<br />
Abbildung <strong>12</strong>.6: Das effektive Potenzial für das rotierende Pendel mit a = 0.2 ℓ. Die Antriebsfrequenz<br />
ω nimmt von oben links nach unten rechts zu.<br />
Bilden wir daraus die Lagrange-Funktion L = T − V, so hat diese wieder die übliche Form einer<br />
Lagrange-Funktion für ein freies Teilchen in einem effektiven Potenzial,<br />
L = 1<br />
2 m ℓ2 ˙ ϑ 2 − � V (ϑ), mit � V (ϑ) = −m g ℓ cos ϑ − 1<br />
2 m ω2 (a + ℓ sin ϑ) 2 . (<strong>12</strong>.67)<br />
Die Bewegungsgleichung für die Auslenkung ϑ ist folglich die für ein gewöhnliches Teilchen in<br />
einem Potenzial � V (ϑ), nur dass es sich hier um eine periodische Koordinate handelt, also ϑ und<br />
ϑ + 2 π dieselbe Pendelstellung repräsentieren.<br />
Die Form des effektiven Potenzials � V hängt von den Parametern des Pendels ab. Entscheidend<br />
sind zwei dimensionslose Größen, nämlich das Verhältnis des Radius a des Antriebs zur Pendellänge<br />
ℓ, sowie das Verhältnis der Antriebsfrequenz ω zur Eigenfrequenz � g/ℓ des Pendels.<br />
Für einige typische Fälle ist das Potenzial in Abbildung <strong>12</strong>.6 dargestellt.<br />
Für ω = 0 handelt es sich um ein gewöhnliches Pendel ohne Antrieb. Es gibt eine stabile<br />
Gleichgewichtslage bei ϑ = 0 und eine instabile Gleichgewichtslage bei ϑ = ±π. Schaltet man<br />
den Antrieb ein, so verschiebt sich die stabile Gleichgewichtslage nach außen. Das Pendel wird<br />
durch die Drehung von der Rotationsachse weg ausgelenkt und kann um die neue stabile Gleichgewichtslage<br />
bei ϑ = ϑ+ > 0 schwingen. Abbildung <strong>12</strong>.5(b) zeigt die “Ruhelage”, bei der das<br />
Pendel starr mit dem Antrieb rotiert. Für ω → ∞ geht ϑ+ → π/2. Bei einem sehr schnellen<br />
Antrieb steht das Pendel beinahe horizontal. Das ist natürlich genau das, was man erwartet.<br />
Interessanterweise gibt es eine kritische Antriebsfrequenz ω = ω0, bei der für ϑ = ϑ− < 0 eine<br />
zweite Gleichgewichtslage auftritt. Diese ist zunächst instabil, da es sich um einen Sattelpunkt<br />
des Potenzials handelt. Für ω > ω0 spaltet sie jedoch in eine stabile und eine instabile Gleichge-<br />
π<br />
π