12 Einfache mechanische Systeme - THEP Mainz
12 Einfache mechanische Systeme - THEP Mainz
12 Einfache mechanische Systeme - THEP Mainz

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
eplacements<br />
(c)<br />
(d)<br />
q3<br />
2 q3<br />
q<br />
¡<br />
q1<br />
Xµ ˙q µ = 0<br />
(a) (b)<br />
¢<br />
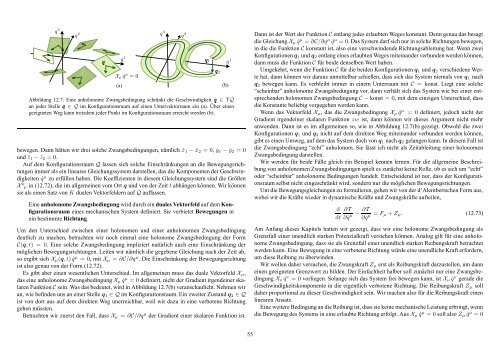
Abbildung <strong>12</strong>.7: Eine anholonome Zwangsbedingung schränkt die Geschwindigkeit ˙ ∈ TQ<br />
an jeder Stelle ∈ Q im Konfigurationsraum auf einen Untervektorraum ein (a). Über einen<br />
geeigneten Weg kann trotzdem jeder Punkt im Konfigurationsraum erreicht werden (b).<br />
bewegen. Dann hätten wir drei solche Zwangsbedingungen, nämlich ˙x1 − ˙x2 = 0, ˙y1 − ˙y2 = 0<br />
und ˙z1 − ˙z2 = 0.<br />
Auf dem Konfigurationsraum Q lassen sich solche Einschränkungen an die Bewegungsrichtungen<br />
immer als ein lineares Gleichungssystem darstellen, das die Komponenten der Geschwindigkeiten<br />
˙q µ zu erfüllen haben. Die Koeffizienten in diesem Gleichungssystem sind die Größen<br />
X k µ in (<strong>12</strong>.72), die im allgemeinen vom Ort q und von der Zeit t abhängen können. Wir können<br />
sie als einen Satz von K dualen Vektorfeldern auf Q auffassen.<br />
Eine anholonome Zwangsbedingung wird durch ein duales Vektorfeld auf dem Konfigurationsraum<br />
eines <strong>mechanische</strong>n System definiert. Sie verbietet Bewegungen in<br />
ein bestimmte Richtung.<br />
Um den Unterschied zwischen einer holonomen und einer anholonomen Zwangsbedingung<br />
deutlich zu machen, betrachten wir noch einmal eine holonome Zwangsbedingung der Form<br />
C(q, t) = 0. Eine solche Zwangsbedingung impliziert natürlich auch eine Einschränkung der<br />
möglichen Bewegungsrichtungen. Leiten wir nämlich die gegebene Gleichung nach der Zeit ab,<br />
so ergibt sich Xµ(q, t) ˙q µ = 0, mit Xµ = ∂C/∂q µ . Die Einschränkung der Bewegungsrichtung<br />
ist also genau von der Form (<strong>12</strong>.72).<br />
Es gibt aber einen wesentlichen Unterschied. Im allgemeinen muss das duale Vektorfeld Xµ,<br />
das eine anholonome Zwangsbedingung Xµ ˙q µ = 0 definiert, nicht der Gradient irgendeiner skalaren<br />
Funktion C sein. Was das bedeutet, wird in Abbildung <strong>12</strong>.7(b) veranschaulicht. Nehmen wir<br />
an, wie befinden uns an einer Stelle q1 ∈ Q im Konfigurationsraum. Ein zweiter Zustand q2 ∈ Q<br />
ist von dort aus auf dem direkten Weg unerreichbar, weil wir dazu in eine verbotene Richtung<br />
gehen müssten.<br />
Betrachten wir zuerst den Fall, dass Xµ = ∂C/∂q µ der Gradient einer skalaren Funktion ist.<br />
q 2<br />
¡<br />
1<br />
¢<br />
¡<br />
2<br />
q 1<br />
55<br />
Dann ist der Wert der Funktion C entlang jedes erlaubten Weges konstant. Denn genau das besagt<br />
die Gleichung Xµ ˙q µ = ∂C/∂q µ ˙q µ = 0. Das System darf sich nur in solche Richtungen bewegen,<br />
in die die Funktion C konstant ist, also eine verschwindende Richtungsableitung hat. Wenn zwei<br />
Konfigurationen q1 und q2 entlang eines erlaubten Weges miteinander verbunden werden können,<br />
dann muss die Funktion C für beide denselben Wert haben.<br />
Umgekehrt, wenn die Funktion C für die beiden Konfigurationen q1 und q2 verschiedene Werte<br />
hat, dann können wir daraus unmittelbar schießen, dass sich das System niemals von q1 nach<br />
q2 bewegen kann. Es verbleibt immer in einem Unterraum mit C = konst. Liegt eine solche<br />
“scheinbar” anholonome Zwangsbedingung vor, dann verhält sich das System wie bei einer entsprechenden<br />
holonomen Zwangsbedingung C − konst = 0, mit dem einzigen Unterschied, dass<br />
die Konstante beliebig vorgegeben werden kann.<br />
Wenn das Vektorfeld Xµ, das die Zwangsbedingung Xµ ˙q µ = 0 definiert, jedoch nicht der<br />
Gradient irgendeiner skalaren Funktion zw ist, dann können wir dieses Argument nicht mehr<br />
anwenden. Dann ist es im allgemeinen so, wie in Abbildung <strong>12</strong>.7(b) gezeigt. Obwohl die zwei<br />
Konfigurationen q1 und q2 nicht auf dem direkten Weg miteinander verbunden werden können,<br />
gibt es einen Umweg, auf dem das System doch von q1 nach q2 gelangen kann. In diesem Fall ist<br />
die Zwangsbedingung “echt” anholonom. Sie lässt ich nicht als Zeitableitung einer holonomen<br />
Zwangsbedingung darstellen.<br />
Wir werden für beide Fälle gleich ein Beispiel kennen lernen. Für die allgemeine Beschreibung<br />
von anholonomen Zwangsbedingungen spielt es zunächst keine Rolle, ob es sich um “echt”<br />
oder “scheinbar” anholonome Bedingungen handelt. Entscheidend ist nur, dass der Konfigurationsraum<br />
selbst nicht eingeschränkt wird, sondern nur die möglichen Bewegungsrichtungen.<br />
Um die Bewegungsgleichungen zu formulieren, gehen wir von der d’Alembertschen Form aus,<br />
wobei wir die Kräfte wieder in dynamische Kräfte und Zwangskräfte aufteilen,<br />
d<br />
dt<br />
∂T ∂T<br />
µ −<br />
∂ ˙q ∂q µ = Fµ + Zµ. (<strong>12</strong>.73)<br />
Am Anfang dieses Kapitels hatten wir gezeigt, dass wir eine holonome Zwangsbedingung als<br />
Grenzfall einer unendlich starken Potenzialkraft verstehen können. Analog gilt für eine anholonome<br />
Zwangsbedingung, dass sie als Grenzfall einer unendlich starken Reibungskraft betrachtet<br />
werden kann. Eine Bewegung in eine verbotene Richtung würde eine unendliche Kraft erfordern,<br />
um diese Reibung zu überwinden.<br />
Wir wollen daher versuchen, die Zwangskraft Zµ erst als Reibungskraft darzustellen, um dann<br />
einen geeigneten Grenzwert zu bilden. Der Einfachheit halber soll zunächst nur eine Zwangsbedingung<br />
Xν ˙q ν = 0 vorliegen. Solange sich das System frei bewegen kann, ist Xν ˙q ν gerade die<br />
Geschwindigkeitskomponente in die eigentlich verbotene Richtung. Die Reibungskraft Zµ soll<br />
daher proportional zu dieser Geschwindigkeit sein. Wir machen also für die Reibungskraft einen<br />
linearen Ansatz.<br />
Eine weitere Bedingung an die Reibung ist, dass sie keine <strong>mechanische</strong> Leistung erbringt, wenn<br />
die Bewegung des Systems in eine erlaubte Richtung erfolgt. Aus Xµ ˙q µ = 0 soll also Zµ ˙q µ = 0