12 Einfache mechanische Systeme - THEP Mainz
12 Einfache mechanische Systeme - THEP Mainz
12 Einfache mechanische Systeme - THEP Mainz

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Aufgabe <strong>12</strong>.2 Man führe die gleichen Überlegungen für die Hantel aus Abbildung 5.3(b) durch.<br />
Was sind hier die geeigneten verallgemeinerten Koordinaten auf dem sechsdimensionalen Konfigurationsraum?<br />
Aufgabe <strong>12</strong>.3 Was passiert, wenn wir in (<strong>12</strong>.11) die Zwangsbedingung C = x 2 + y 2 + z 2 − ℓ 2<br />
durch C = (x 2 +y 2 +z 2 −ℓ 2 ) 2 ersetzen? Sie hat offenbar die gleiche Nullstellenmenge, beschreibt<br />
also die gleiche physikalische Einschränkung der möglichen Konfigurationen. Warum ergeben<br />
sich trotzdem nicht die richtigen Bewegungsgleichungen?<br />
Der reduzierte Konfigurationsraum<br />
Holonome Zwangsbedingungen lassen sich im Prinzip immer auf die gerade gezeigte Art und<br />
Weise auflösen. Durch geschickte Wahl der Koordinaten kann die Zahl der zu lösenden Bewegungsgleichungen<br />
reduziert werden, wobei die Multiplikatoren in diesen Gleichungen gar nicht<br />
mehr vorkommen.<br />
Die Idee ist kurz gefasst die folgende. Da wir ohnehin schon wissen, dass sich das System<br />
nur eingeschränkt bewegen kann, sollte es möglich sein, dies bereits beim Aufstellen der Bewegungsgleichungen<br />
zu berücksichtigen. Wir sollten von Anfang an überhaupt nur solche Bahnen<br />
zulassen, die auch realisierbar sind, anstatt erst alle Bahnen im Konfigurationsraum zu betrachten,<br />
um aus dieser, eigentlich viel zu großen Menge dann mit Hilfe der Bewegungsgleichungen die<br />
tatsächlich realisierten Bahnen herauszusuchen.<br />
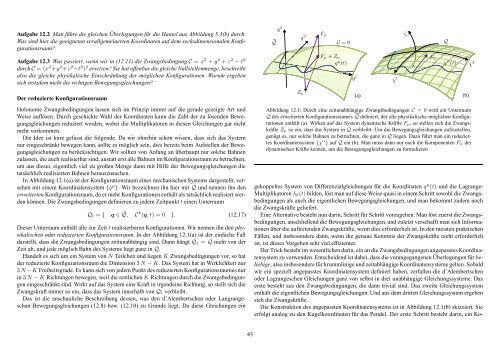
In Abbildung <strong>12</strong>.1(a) ist der Konfigurationsraum eines <strong>mechanische</strong>n Systems dargestellt, versehen<br />
mit einem Koordinatensystem {q µ }. Wir bezeichnen ihn hier mit � Q und nennen ihn den<br />
erweiterten Konfigurationsraum, da er mehr Konfigurationen enthält als tatsächlich realisiert werden<br />
können. Die Zwangsbedingungen definieren zu jedem Zeitpunkt t einen Unterraum<br />
Qt = { q ∈ � Q, C k (q, t) = 0 }. (<strong>12</strong>.17)<br />
Dieser Unterraum enthält alle zur Zeit t realisierbaren Konfigurationen. Wir nennen ihn den physikalischen<br />
oder reduzierten Konfigurationsraum. In der Abbildung <strong>12</strong>.1(a) ist der einfache Fall<br />
darstellt, dass die Zwangsbedingungen zeitunabhängig sind. Dann hängt Qt = Q nicht von der<br />
Zeit ab, und jede möglich Bahn des Systems liegt ganz in Q.<br />
Handelt es sich um ein System von N Teilchen und liegen K Zwangsbedingungen vor, so hat<br />
der reduzierte Konfigurationsraum die Dimension 3 N − K. Das System hat in Wirklichkeit nur<br />
3 N −K Freiheitsgrade. Es kann sich von jedem Punkt des reduzierten Konfigurationsraumes nur<br />
in 3 N − K Richtungen bewegen, weil die restlichen K Richtungen durch die Zwangsbedingungen<br />
eingeschränkt sind. Wirkt auf das System eine Kraft in irgendeine Richtung, so stellt sich die<br />
Zwangskraft immer so ein, dass das System innerhalb von Qt verbleibt.<br />
Das ist die anschauliche Beschreibung dessen, was den d’Alembertschen oder Langrangeschen<br />
Bewegungsgleichungen (<strong>12</strong>.8) bzw. (<strong>12</strong>.10) zu Grunde liegt. Da diese Gleichungen ein<br />
43<br />
Q<br />
q 3<br />
q 2<br />
Zµ<br />
Fµ<br />
C = 0<br />
Fµ + Zµ<br />
Fα<br />
q µ (t) χ α (t)<br />
q 1<br />
χ 1<br />
ζ<br />
(a) (b)<br />
Abbildung <strong>12</strong>.1: Durch eine zeitunabhängige Zwangsbedingungen C = 0 wird ein Unterraum<br />
Q des erweiterten Konfigurationsraumes Q definiert, der alle physikalische möglichen Konfigurationen<br />
enthält (a). Wirken auf das System dynamische Kräfte Fµ, so stellen sich die Zwangskräfte<br />
Zµ so ein, dass das System in Q verbleibt. Um die Bewegungsgleichungen aufzustellen,<br />
genügt es, nur solche Bahnen zu betrachten, die ganz in Q liegen. Dazu führt man ein reduziertes<br />
Koordinatensystem {χ α } auf Q ein (b). Man muss dann nur noch die Komponenten Fα der<br />
dynamischen Kräfte kennen, um die Bewegungsgleichungen zu formulieren<br />
gekoppeltes System von Differenzialgleichungen für die Koordinaten q µ (t) und die Lagrange-<br />
Multiplikatoren λk(t) bilden, löst man auf diese Weise quasi in einem Schritt sowohl die Zwangsbedingungen<br />
als auch die eigentlichen Bewegungsgleichungen, und man bekommt zudem noch<br />
die Zwangskräfte geliefert.<br />
Eine Alternative besteht nun darin, Schritt für Schritt vorzugehen. Man löst zuerst die Zwangsbedingungen,<br />
anschließend die Bewegungsgleichungen, und zuletzt verschafft man sich Informationen<br />
über die auftretenden Zwangskräfte, wenn dies erforderlich ist. In den meisten praktischen<br />
Fällen, und insbesondere dann, wenn die genaue Kenntnis der Zwangskräfte nicht erforderlich<br />
ist, ist dieses Vorgehen sehr viel effizienter.<br />
Der Trick besteht im wesentlichen darin, ein an die Zwangsbedingungen angepasstes Koordinatensystem<br />
zu verwenden. Entscheidend ist dabei, dass die vorangegangenen Überlegungen für beliebige,<br />
also insbesondere für krummlinige und zeitabhängige Koordinatensysteme gelten. Sobald<br />
wir ein speziell angepasstes Koordinatensystem definiert haben, zerfallen die d’Alembertschen<br />
oder Lagrangeschen Gleichungen ganz von selbst in drei unabhängige Gleichungssysteme. Das<br />
erste besteht aus den Zwangsbedingungen, die dann trivial sind. Das zweite Gleichungssystem<br />
enthält die eigentlichen Bewegungsgleichungen. Und aus dem dritten Gleichungssystem ergeben<br />
sich die Zwangskräfte.<br />
Die Konstruktion des angepassten Koordinatensystems ist in Abbildung <strong>12</strong>.1(b) skizziert. Sie<br />
erfolgt analog zu den Kugelkoordinaten für das Pendel. Der erste Schritt besteht darin, ein Ko-<br />
Q<br />
χ 2