Design and Implementation of TinyGALS: A Programming Model for ...
Design and Implementation of TinyGALS: A Programming Model for ...
Design and Implementation of TinyGALS: A Programming Model for ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
unlike Click, the <strong>TinyGALS</strong> model does not contain a task queue. 15<br />
Pull processing in sensor networks Although <strong>TinyGALS</strong> does not currently use pull<br />
processing, the following example by Jie Liu given in [42] illustrates a situation in which<br />
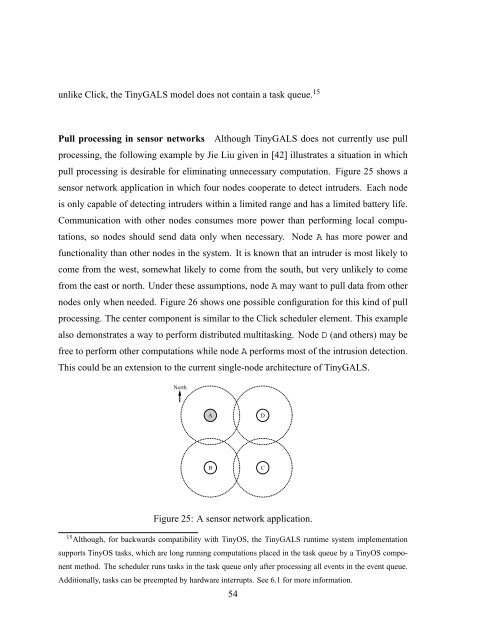
pull processing is desirable <strong>for</strong> eliminating unnecessary computation. Figure 25 shows a<br />
sensor network application in which four nodes cooperate to detect intruders. Each node<br />
is only capable <strong>of</strong> detecting intruders within a limited range <strong>and</strong> has a limited battery life.<br />
Communication with other nodes consumes more power than per<strong>for</strong>ming local compu-<br />
tations, so nodes should send data only when necessary. Node A has more power <strong>and</strong><br />
functionality than other nodes in the system. It is known that an intruder is most likely to<br />
come from the west, somewhat likely to come from the south, but very unlikely to come<br />
from the east or north. Under these assumptions, node A may want to pull data from other<br />
nodes only when needed. Figure 26 shows one possible configuration <strong>for</strong> this kind <strong>of</strong> pull<br />
processing. The center component is similar to the Click scheduler element. This example<br />
also demonstrates a way to per<strong>for</strong>m distributed multitasking. Node D (<strong>and</strong> others) may be<br />
free to per<strong>for</strong>m other computations while node A per<strong>for</strong>ms most <strong>of</strong> the intrusion detection.<br />
This could be an extension to the current single-node architecture <strong>of</strong> <strong>TinyGALS</strong>.<br />
North<br />
A D<br />
B C<br />
Figure 25: A sensor network application.<br />
15 Although, <strong>for</strong> backwards compatibility with TinyOS, the <strong>TinyGALS</strong> runtime system implementation<br />
supports TinyOS tasks, which are long running computations placed in the task queue by a TinyOS compo-<br />
nent method. The scheduler runs tasks in the task queue only after processing all events in the event queue.<br />
Additionally, tasks can be preempted by hardware interrupts. See 6.1 <strong>for</strong> more in<strong>for</strong>mation.<br />
54