AP-G84/04 Best practice in road use data collection, analysis ... - WIM
AP-G84/04 Best practice in road use data collection, analysis ... - WIM
AP-G84/04 Best practice in road use data collection, analysis ... - WIM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Accessed by AR - ARRB TRANSPORT RESEARCH on <strong>04</strong> Feb 2005<br />
Aust<strong>road</strong>s 20<strong>04</strong><br />
— 6 —<br />
<strong>Best</strong> Practices <strong>in</strong> Road Use Data Collection, Analysis and Report<strong>in</strong>g<br />
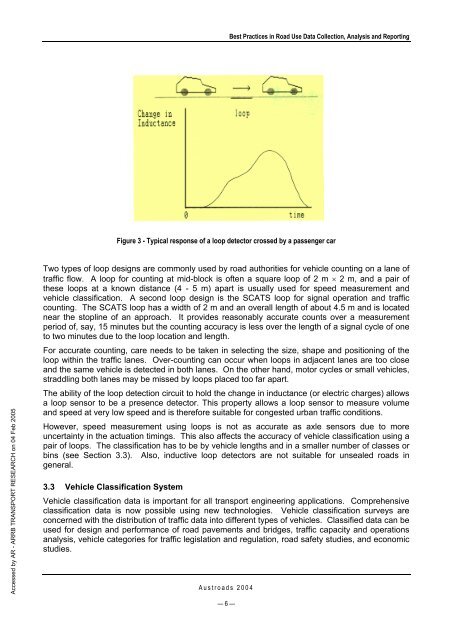
Figure 3 - Typical response of a loop detector crossed by a passenger car<br />
Two types of loop designs are commonly <strong>use</strong>d by <strong>road</strong> authorities for vehicle count<strong>in</strong>g on a lane of<br />
traffic flow. A loop for count<strong>in</strong>g at mid-block is often a square loop of 2 m × 2 m, and a pair of<br />
these loops at a known distance (4 - 5 m) apart is usually <strong>use</strong>d for speed measurement and<br />
vehicle classification. A second loop design is the SCATS loop for signal operation and traffic<br />
count<strong>in</strong>g. The SCATS loop has a width of 2 m and an overall length of about 4.5 m and is located<br />
near the stopl<strong>in</strong>e of an approach. It provides reasonably accurate counts over a measurement<br />
period of, say, 15 m<strong>in</strong>utes but the count<strong>in</strong>g accuracy is less over the length of a signal cycle of one<br />
to two m<strong>in</strong>utes due to the loop location and length.<br />
For accurate count<strong>in</strong>g, care needs to be taken <strong>in</strong> select<strong>in</strong>g the size, shape and position<strong>in</strong>g of the<br />
loop with<strong>in</strong> the traffic lanes. Over-count<strong>in</strong>g can occur when loops <strong>in</strong> adjacent lanes are too close<br />
and the same vehicle is detected <strong>in</strong> both lanes. On the other hand, motor cycles or small vehicles,<br />
straddl<strong>in</strong>g both lanes may be missed by loops placed too far apart.<br />
The ability of the loop detection circuit to hold the change <strong>in</strong> <strong>in</strong>ductance (or electric charges) allows<br />
a loop sensor to be a presence detector. This property allows a loop sensor to measure volume<br />
and speed at very low speed and is therefore suitable for congested urban traffic conditions.<br />
However, speed measurement us<strong>in</strong>g loops is not as accurate as axle sensors due to more<br />
uncerta<strong>in</strong>ty <strong>in</strong> the actuation tim<strong>in</strong>gs. This also affects the accuracy of vehicle classification us<strong>in</strong>g a<br />
pair of loops. The classification has to be by vehicle lengths and <strong>in</strong> a smaller number of classes or<br />
b<strong>in</strong>s (see Section 3.3). Also, <strong>in</strong>ductive loop detectors are not suitable for unsealed <strong>road</strong>s <strong>in</strong><br />
general.<br />
3.3 Vehicle Classification System<br />
Vehicle classification <strong>data</strong> is important for all transport eng<strong>in</strong>eer<strong>in</strong>g applications. Comprehensive<br />
classification <strong>data</strong> is now possible us<strong>in</strong>g new technologies. Vehicle classification surveys are<br />
concerned with the distribution of traffic <strong>data</strong> <strong>in</strong>to different types of vehicles. Classified <strong>data</strong> can be<br />
<strong>use</strong>d for design and performance of <strong>road</strong> pavements and bridges, traffic capacity and operations<br />
<strong>analysis</strong>, vehicle categories for traffic legislation and regulation, <strong>road</strong> safety studies, and economic<br />
studies.