Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Plasma Phys. Control. Fusion 53 (2011) 093001<br />
Topical Review<br />
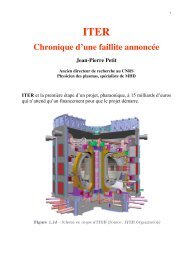
Figure 34. Trajectories calculated for <strong>the</strong> slug model with constant current [261].<br />
trajectories <strong>of</strong> both <strong>the</strong> piston and <strong>the</strong> shock front. In many ways this aspect is similar to<br />
Kuwabara [262] who resorted to a numerical integration. Potter proceeds fur<strong>the</strong>r to show that<br />
<strong>the</strong>re is a final equilibrium, in which <strong>the</strong> ratio <strong>of</strong> <strong>the</strong> <strong>pinch</strong> radius to its initial radius becomes<br />
purely a function <strong>of</strong> Ɣ, <strong>the</strong> ratio <strong>of</strong> <strong>the</strong> principal specific heats.<br />
The model assumes again a sheet current piston, and a thin shock thickness with a uniform<br />
pressure between <strong>the</strong> piston and <strong>the</strong> shock. The thinness <strong>of</strong> <strong>the</strong> shock means that planar<br />
Rankine–Hugoniot conditions can be applied to <strong>the</strong> shock transition. For a strong shock <strong>the</strong>se<br />
conditions directly relate <strong>the</strong> fluid velocity u s <strong>the</strong> density ρ s and pressure p s immediately<br />
behind <strong>the</strong> shock to <strong>the</strong> filling density ρ 0 and <strong>the</strong> speed <strong>of</strong> shock v s (= dr s /dt) given by<br />
u s = 2<br />
Ɣ +1 v s, (4.4)<br />
ρ s = Ɣ +1<br />
Ɣ − 1 ρ 0, (4.5)<br />
p s = 2<br />
Ɣ +1 ρ 0vs 2 . (4.6)<br />
The condition <strong>of</strong> uniform pressure between <strong>the</strong> shock and piston relies on <strong>the</strong> sound transit<br />
time being short compared with <strong>the</strong> time taken for <strong>the</strong> shock to reach <strong>the</strong> axis. This condition<br />
becomes<br />
(<br />
Ɣ +1<br />
1 ≫<br />
1 − r ) [<br />
s Ɣ<br />
[2Ɣ(Ɣ − 1)] 1/2 r p Ɣ +1− rs 2/r2 p<br />
] Ɣ<br />
Ɣ−1<br />
, (4.7)<br />
where <strong>the</strong> sound velocity immediately behind <strong>the</strong> shock is taken. As <strong>the</strong> shock converges to<br />
<strong>the</strong> axis (r s /r p > 0.1) <strong>the</strong> right-hand side is as high as 0.5 for Ɣ = 5/3 and 0.3 for Ɣ = 1.4.<br />
In addition, <strong>the</strong> sound speed decreases to about half its value towards <strong>the</strong> piston due to <strong>the</strong><br />
temperature pr<strong>of</strong>ile obtained by this model with no <strong>the</strong>rmal conduction. Thus <strong>the</strong> assumptions<br />
are perhaps questionable.<br />
An interesting feature <strong>of</strong> <strong>the</strong> slug model is that because <strong>of</strong> <strong>the</strong> assumption <strong>of</strong> spatially<br />
uniform pressure between <strong>the</strong> piston and shock <strong>the</strong> piston comes uniformly to rest as <strong>the</strong> shock<br />
reaches <strong>the</strong> axis as shown in figure 34, and <strong>the</strong>re is no reflected shock or bouncing. The ratio<br />
59