Elektronika 2010-11.pdf - Instytut Systemów Elektronicznych ...
Elektronika 2010-11.pdf - Instytut Systemów Elektronicznych ...
Elektronika 2010-11.pdf - Instytut Systemów Elektronicznych ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
tion about a set. That is why we can define an interval type-2<br />
fuzzy set with upper and lower bounds of function defined on<br />
(x,u) plane (a shaded area in Fig. 1). They are called respectively:<br />
upper and lower membership functions and both are<br />
type-1 membership functions. An example is shown in Fig. 2.<br />
All the fuzzy operations on interval fuzzy sets are defined<br />
by using well known classical fuzzy logic [9,13]. Type-2 fuzzy<br />
sets bring an additional degree of freedom comparing to type-<br />
1 fuzzy sets. In the case of interval fuzzy sets, designers don’t<br />
loose that degree of freedom. Because of that, and the fact<br />
that general type-2 fuzzy sets require complex computations,<br />
interval type-2 fuzzy sets are widely used in practical applications.<br />
Type-2 fuzzy logic controller<br />
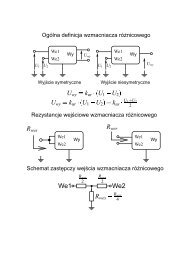
The general structure of a type-2 fuzzy logic controller, depicted<br />
in Fig. 3, consists of four basic modules: fuzzification, fuzzy inference<br />
with the rule base, type reduction and defuzzification.<br />
In the fuzzifier block crisp values from inputs are mapped<br />
into type-2 fuzzy sets. As a result, for each input signal two<br />
membership levels are obtained, one called lower membership<br />
level and the other called upper membership level, which<br />
are computed from the lower and upper membership functions<br />
respectively.<br />
In the inference block type-2 fuzzy antecedents sets are<br />
combined and computed to the type-2 fuzzy consequent sets.<br />
These operations are based on a set of fuzzy rules which are<br />
stored in the rule base. In this paper the following form of the<br />
rules was used:<br />
R if<br />
x<br />
is<br />
X<br />
and<br />
x<br />
is<br />
X<br />
...or<br />
x<br />
is<br />
X<br />
...<br />
then<br />
y<br />
is<br />
Y<br />
,<br />
y<br />
is<br />
Y<br />
... (4)<br />
k<br />
: 1 1<br />
j<br />
2<br />
2<br />
l<br />
i<br />
ij<br />
1<br />
1<br />
j<br />
2<br />
2<br />
l<br />
where x i<br />
and y i<br />
are input and output linguistic variables (eg.<br />
speed, height, temperature), X k<br />
and Y l<br />
represents labels of<br />
interval type-2 fuzzy sets (eg. slow, fast, low, medium, high).<br />
The connectives and, or represent operations on fuzzy sets:<br />
intersection and union, respectively, defined for type-1 fuzzy<br />
sets as stated in the previous section. Several assumptions<br />
have been made on fuzzy reasoning process:<br />
• Mamdani method of fuzzy reasoning is employed,<br />
• “and” connective is implemented as min,<br />
Fig. 3. General block diagram of a type-2 fuzzy logic controller<br />
Rys. 3. Schemat blokowy sterownika rozmytego 2-go rzędu<br />
• “or” connective is implemented as max,<br />
• rules connective is implemented as max.<br />
The type reduction module represents mapping from interval<br />
type-2 fuzzy sets into classical interval fuzzy sets. Since<br />
we operate on interval sets, it computes an interval [y L<br />
, y R<br />
].<br />
To date two algorithms have been proposed for interval type-<br />
2 fuzzy sets: the Karnick-Mendel iterative procedure [5] and<br />
the Wu-Mendel closed forms [7]. The former method provides<br />
an exact computation, the latter provides an approximation.<br />
Although the KM algorithm is computationally more costly, we<br />
decided to implement this solution. As mentioned earlier, the<br />
aim of this algorithm is to find an interval. In order to do so,<br />
centroids of certain type-1 membership functions are computed.<br />
The algorithm looks as follows.<br />
Algorithm 1. The Karnick-Mendel procedure of type reduction.<br />
Step 1. Initialization: set µ i<br />
and calculate y’ for each sample of<br />
the output type-2 fuzzy set (i indicates consecutive samples):<br />
s<br />
−<br />
1<br />
∑<br />
x<br />
i *<br />
µ<br />
i<br />
µ<br />
+<br />
= 1<br />
i<br />
µ<br />
i<br />
i<br />
y<br />
' =<br />
,<br />
µ<br />
= , i = 0,1,..., s −1 s−1<br />
i<br />
, (5)<br />
2<br />
µ<br />
∑<br />
i<br />
=<br />
1<br />
i<br />
Step 2. Find index k (1 ≤ k ≤ s-1) such that x k-1<br />
≤ y’ ≤ x k+1<br />
.<br />
Fig. 4. An example of type-2 fuzzy reasoning<br />
Rys. 4. Przykład wnioskowania rozmytego opartego na zbiorach rozmytych 2-go rzędu<br />
<strong>Elektronika</strong> 11/<strong>2010</strong> 45