Radar Technology for Level Gauging - Krohne
Radar Technology for Level Gauging - Krohne
Radar Technology for Level Gauging - Krohne

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
8. Evaluation methods<br />
8.1 Object discrimination<br />
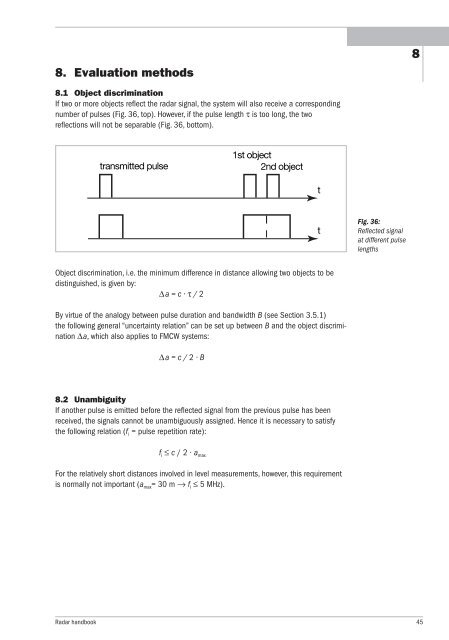
If two or more objects reflect the radar signal, the system will also receive a corresponding<br />
number of pulses (Fig. 36, top). However, if the pulse length τ is too long, the two<br />
reflections will not be separable (Fig. 36, bottom).<br />
transmitted pulse<br />
Object discrimination, i.e. the minimum difference in distance allowing two objects to be<br />
distinguished, is given by:<br />
∆a = c · τ / 2<br />
By virtue of the analogy between pulse duration and bandwidth B (see Section 3.5.1)<br />
the following general “uncertainty relation” can be set up between B and the object discrimination<br />
∆a,which also applies to FMCW systems:<br />
∆a = c / 2 · B<br />
8.2 Unambiguity<br />
If another pulse is emitted be<strong>for</strong>e the reflected signal from the previous pulse has been<br />
received, the signals cannot be unambiguously assigned. Hence it is necessary to satisfy<br />
the following relation (f i = pulse repetition rate):<br />
f i ≤ c / 2 · a max<br />
1st object<br />
2nd object<br />
For the relatively short distances involved in level measurements, however, this requirement<br />
is normally not important (a max= 30 m → f i ≤ 5 MHz).<br />
Fig. 36:<br />
Reflected signal<br />
at different pulse<br />
lengths<br />
<strong>Radar</strong> handbook 45<br />
t<br />
t<br />
8