

guideline and standards for skytem measurements, processing and ...
guideline and standards for skytem measurements, processing and ...
guideline and standards for skytem measurements, processing and ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
January 2011<br />
<br />
<br />
<br />
<br />
<br />
<br />
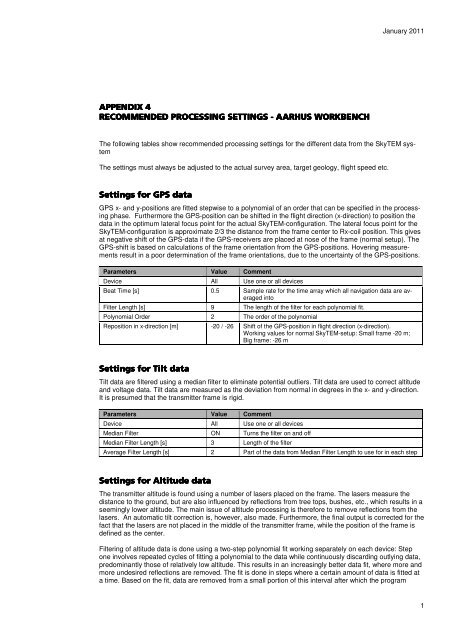
The following tables show recommended <strong>processing</strong> settings <strong>for</strong> the different data from the SkyTEM system<br />
The settings must always be adjusted to the actual survey area, target geology, flight speed etc.<br />
!!<br />
GPS x- <strong>and</strong> y-positions are fitted stepwise to a polynomial of an order that can be specified in the <strong>processing</strong><br />
phase. Furthermore the GPS-position can be shifted in the flight direction (x-direction) to position the<br />
data in the optimum lateral focus point <strong>for</strong> the actual SkyTEM-configuration. The lateral focus point <strong>for</strong> the<br />
SkyTEM-configuration is approximate 2/3 the distance from the frame center to Rx-coil position. This gives<br />
at negative shift of the GPS-data if the GPS-receivers are placed at nose of the frame (normal setup). The<br />
GPS-shift is based on calculations of the frame orientation from the GPS-positions. Hovering <strong>measurements</strong><br />
result in a poor determination of the frame orientations, due to the uncertainty of the GPS-positions.<br />
Parameters Value Comment<br />
Device All Use one or all devices<br />
Beat Time [s] 0.5 Sample rate <strong>for</strong> the time array which all navigation data are averaged<br />
into<br />
Filter Length [s] 9 The length of the filter <strong>for</strong> each polynomial fit.<br />
Polynomial Order 2 The order of the polynomial<br />
Reposition in x-direction [m] -20 / -26 Shift of the GPS-position in flight direction (x-direction).<br />
Working values <strong>for</strong> normal SkyTEM-setup: Small frame -20 m;<br />
Big frame: -26 m<br />
" !!<br />
Tilt data are filtered using a median filter to eliminate potential outliers. Tilt data are used to correct altitude<br />
<strong>and</strong> voltage data. Tilt data are measured as the deviation from normal in degrees in the x- <strong>and</strong> y-direction.<br />
It is presumed that the transmitter frame is rigid.<br />
Parameters Value Comment<br />
Device All Use one or all devices<br />
Median Filter ON Turns the filter on <strong>and</strong> off<br />
Median Filter Length [s] 3 Length of the filter<br />
Average Filter Length [s] 2 Part of the data from Median Filter Length to use <strong>for</strong> in each step<br />
"# <br />
!!<br />
The transmitter altitude is found using a number of lasers placed on the frame. The lasers measure the<br />
distance to the ground, but are also influenced by reflections from tree tops, bushes, etc., which results in a<br />
seemingly lower altitude. The main issue of altitude <strong>processing</strong> is there<strong>for</strong>e to remove reflections from the<br />
lasers. An automatic tilt correction is, however, also made. Furthermore, the final output is corrected <strong>for</strong> the<br />
fact that the lasers are not placed in the middle of the transmitter frame, while the position of the frame is<br />
defined as the center.<br />
Filtering of altitude data is done using a two-step polynomial fit working separately on each device: Step<br />
one involves repeated cycles of fitting a polynomial to the data while continuously discarding outlying data,<br />
predominantly those of relatively low altitude. This results in an increasingly better data fit, where more <strong>and</strong><br />
more undesired reflections are removed. The fit is done in steps where a certain amount of data is fitted at<br />
a time. Based on the fit, data are removed from a small portion of this interval after which the program<br />
1












