Conformal Geometric Algebra in Stochastic Optimization Problems ...
Conformal Geometric Algebra in Stochastic Optimization Problems ...
Conformal Geometric Algebra in Stochastic Optimization Problems ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
8.2. POSE ESTIMATION 213<br />
8.2.3 Experiments<br />
The experiments presented here are throughout real world experiments. For both<br />
methods no rigorous calibration was carried out. The only th<strong>in</strong>g that was done was<br />
to determ<strong>in</strong>e the focal length and the image center from the outl<strong>in</strong>e of the iris-like<br />
image as described on page 208. For equation (8.4) the mirror radius rM = 40mm<br />
and the focal length fmm = 16.7mm were used as <strong>in</strong>tr<strong>in</strong>sic parameters. Note that<br />
these values come directly from the manufacturer.<br />
Throughout all experiments, observations were taken from the sensory data by<br />
hand. The reason is a lack of sufficiently robust and accurate automatic methods<br />
cop<strong>in</strong>g with sensitivity regard<strong>in</strong>g light<strong>in</strong>g conditions, ‘curvy’ mapp<strong>in</strong>gs of straight<br />
l<strong>in</strong>es, especially for loosely calibrated systems, and the related non-uniform imag<strong>in</strong>g<br />
resolution, which decreases towards the image center as demonstrated on the right<br />
side of figure 8.6. Another issue is the correspondence problem, see item 2 of<br />
the general pose estimation assumptions on page 136, which is likely the biggest<br />
challenge <strong>in</strong> pose estimation. A human observer can, under these circumstances and<br />
with some effort, ensure that the underly<strong>in</strong>g assumptions are not violated. Thus<br />
assess<strong>in</strong>g the method as such, i.e. its consistency, is possible.<br />
Po<strong>in</strong>t-L<strong>in</strong>e<br />
Two experiments were conducted us<strong>in</strong>g aSony DxC-151AP camera with a resolution<br />
of 768 × 576 pixels.<br />
In the first set of experiments, a pose estimation with respect<br />
to a model house was done. Tags were attached to<br />
the house at certa<strong>in</strong> positions so as to allow for a smooth<br />
feature po<strong>in</strong>t retrieval from the omnidirectional pictures;<br />
each tag reflects one vertex <strong>in</strong> the known house model.<br />
The image coord<strong>in</strong>ates correspond<strong>in</strong>g to these po<strong>in</strong>ts of<br />
<strong>in</strong>terest were extracted manually. One illustrative view<br />
of the model house and all visible feature po<strong>in</strong>ts, as extracted,<br />
is depicted on the left side of figure 8.8 (show<strong>in</strong>g<br />
only the relevant part of the sensed image). The house<br />
dimensions <strong>in</strong> cm are approximately 21×15×21.<br />
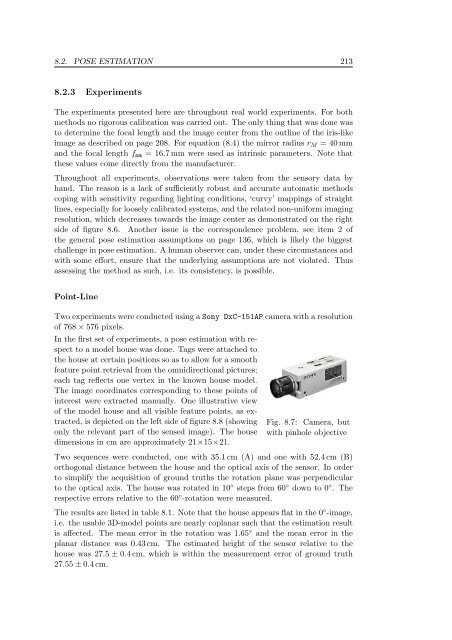
Fig. 8.7: Camera, but<br />
with p<strong>in</strong>hole objective<br />
Two sequences were conducted, one with 35.1 cm (A) and one with 52.4cm (B)<br />
orthogonal distance between the house and the optical axis of the sensor. In order<br />
to simplify the acquisition of ground truths the rotation plane was perpendicular<br />
to the optical axis. The house was rotated <strong>in</strong> 10 ◦ steps from 60 ◦ down to 0 ◦ . The<br />
respective errors relative to the 60 ◦ -rotation were measured.<br />
The results are listed <strong>in</strong> table 8.1. Note that the house appears flat <strong>in</strong> the 0 ◦ -image,<br />
i.e. the usable 3D-model po<strong>in</strong>ts are nearly coplanar such that the estimation result<br />
is affected. The mean error <strong>in</strong> the rotation was 1.65 ◦ and the mean error <strong>in</strong> the<br />
planar distance was 0.43cm. The estimated height of the sensor relative to the<br />
house was 27.5 ± 0.4cm, which is with<strong>in</strong> the measurement error of ground truth<br />
27.55 ± 0.4 cm.