

Vendetta Final Proposal Part 2 - Cal Poly
Vendetta Final Proposal Part 2 - Cal Poly
Vendetta Final Proposal Part 2 - Cal Poly

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
ehaviors and to adhere to MIL-8785C. It was calculated that the <strong>Vendetta</strong>’s fuselage forebody will destabilize the<br />
aircraft an additional 3.1% in subsonic cruise and 5.0% in supersonic cruise. The wing was placed to account for this.<br />
This is much improved over previous configurations where the fuselage destabilized the aircraft up to 16%. This is due<br />
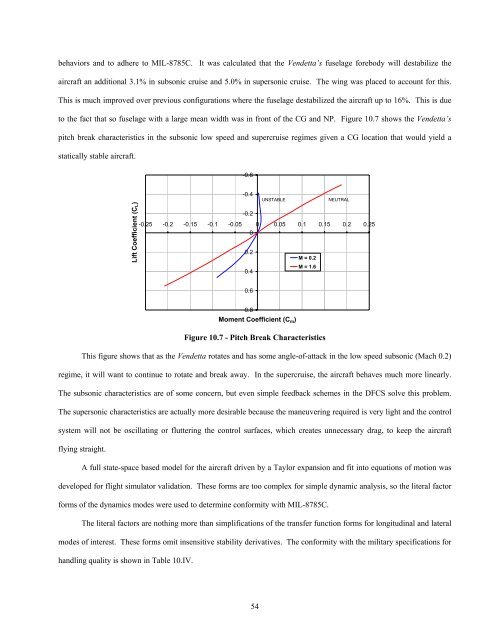
to the fact that so fuselage with a large mean width was in front of the CG and NP. Figure 10.7 shows the <strong>Vendetta</strong>’s<br />
pitch break characteristics in the subsonic low speed and supercruise regimes given a CG location that would yield a<br />
statically stable aircraft.<br />
-0.6<br />
Lift Coefficient (C L )<br />
-0.4<br />
UNSTABLE<br />
NEUTRAL<br />
-0.2<br />
-0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 0.25<br />
0<br />
0.2<br />
M = 0.2<br />
M = 1.6<br />
0.4<br />
0.6<br />
0.8<br />
Moment Coefficient (C m )<br />
Figure 10.7 - Pitch Break Characteristics<br />
This figure shows that as the <strong>Vendetta</strong> rotates and has some angle-of-attack in the low speed subsonic (Mach 0.2)<br />
regime, it will want to continue to rotate and break away. In the supercruise, the aircraft behaves much more linearly.<br />
The subsonic characteristics are of some concern, but even simple feedback schemes in the DFCS solve this problem.<br />
The supersonic characteristics are actually more desirable because the maneuvering required is very light and the control<br />
system will not be oscillating or fluttering the control surfaces, which creates unnecessary drag, to keep the aircraft<br />
flying straight.<br />
A full state-space based model for the aircraft driven by a Taylor expansion and fit into equations of motion was<br />
developed for flight simulator validation. These forms are too complex for simple dynamic analysis, so the literal factor<br />
forms of the dynamics modes were used to determine conformity with MIL-8785C.<br />
The literal factors are nothing more than simplifications of the transfer function forms for longitudinal and lateral<br />
modes of interest. These forms omit insensitive stability derivatives. The conformity with the military specifications for<br />
handling quality is shown in Table 10.IV.<br />
54










