

To the Graduate Council: I am submitting herewith a thesis written by ...
To the Graduate Council: I am submitting herewith a thesis written by ...
To the Graduate Council: I am submitting herewith a thesis written by ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
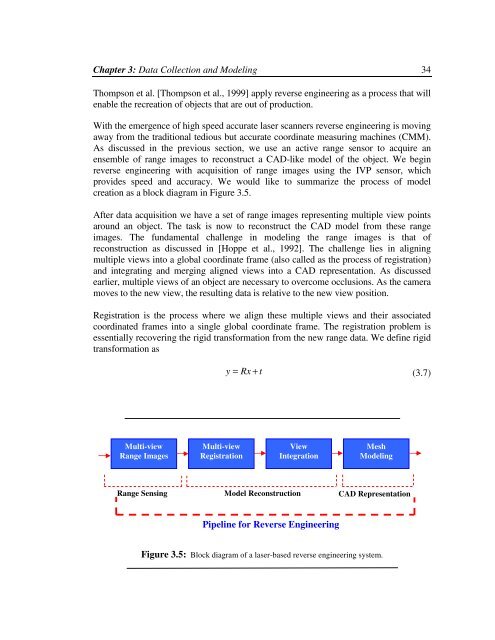
Chapter 3: Data Collection and Modeling 34Thompson et al. [Thompson et al., 1999] apply reverse engineering as a process that willenable <strong>the</strong> recreation of objects that are out of production.With <strong>the</strong> emergence of high speed accurate laser scanners reverse engineering is movingaway from <strong>the</strong> traditional tedious but accurate coordinate measuring machines (CMM).As discussed in <strong>the</strong> previous section, we use an active range sensor to acquire anensemble of range images to reconstruct a CAD-like model of <strong>the</strong> object. We beginreverse engineering with acquisition of range images using <strong>the</strong> IVP sensor, whichprovides speed and accuracy. We would like to summarize <strong>the</strong> process of modelcreation as a block diagr<strong>am</strong> in Figure 3.5.After data acquisition we have a set of range images representing multiple view pointsaround an object. The task is now to reconstruct <strong>the</strong> CAD model from <strong>the</strong>se rangeimages. The fund<strong>am</strong>ental challenge in modeling <strong>the</strong> range images is that ofreconstruction as discussed in [Hoppe et al., 1992]. The challenge lies in aligningmultiple views into a global coordinate fr<strong>am</strong>e (also called as <strong>the</strong> process of registration)and integrating and merging aligned views into a CAD representation. As discussedearlier, multiple views of an object are necessary to overcome occlusions. As <strong>the</strong> c<strong>am</strong>er<strong>am</strong>oves to <strong>the</strong> new view, <strong>the</strong> resulting data is relative to <strong>the</strong> new view position.Registration is <strong>the</strong> process where we align <strong>the</strong>se multiple views and <strong>the</strong>ir associatedcoordinated fr<strong>am</strong>es into a single global coordinate fr<strong>am</strong>e. The registration problem isessentially recovering <strong>the</strong> rigid transformation from <strong>the</strong> new range data. We define rigidtransformation asy = Rx + t(3.7)Multi-viewRange ImagesMulti-viewRegistrationViewIntegrationMeshModelingRange Sensing Model Reconstruction CAD RepresentationPipeline for Reverse EngineeringFigure 3.5: Block diagr<strong>am</strong> of a laser-based reverse engineering system.













