

To the Graduate Council: I am submitting herewith a thesis written by ...
To the Graduate Council: I am submitting herewith a thesis written by ...
To the Graduate Council: I am submitting herewith a thesis written by ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
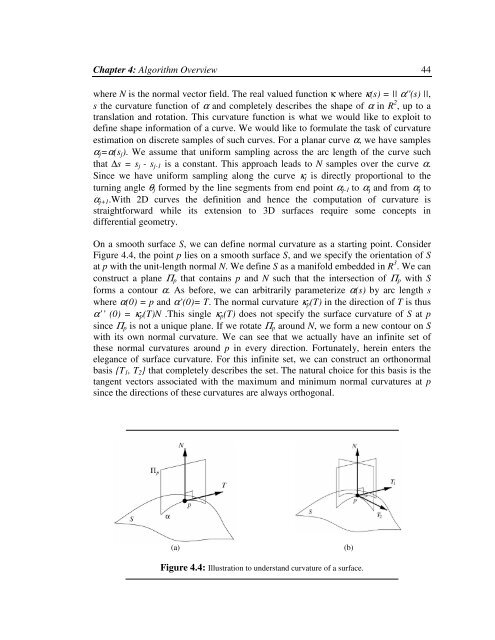
Chapter 4: Algorithm Overview 44where N is <strong>the</strong> normal vector field. The real valued function κ where κ(s) = || α '(s) ||,s <strong>the</strong> curvature function of α and completely describes <strong>the</strong> shape of α in R 2 , up to atranslation and rotation. This curvature function is what we would like to exploit todefine shape information of a curve. We would like to formulate <strong>the</strong> task of curvatureestimation on discrete s<strong>am</strong>ples of such curves. For a planar curve α, we have s<strong>am</strong>plesα j =α(s j ). We assume that uniform s<strong>am</strong>pling across <strong>the</strong> arc length of <strong>the</strong> curve suchthat ∆s = s j - s j-1 is a constant. This approach leads to N s<strong>am</strong>ples over <strong>the</strong> curve α.Since we have uniform s<strong>am</strong>pling along <strong>the</strong> curve κ j is directly proportional to <strong>the</strong>turning angle θ j formed <strong>by</strong> <strong>the</strong> line segments from end point α j-1 to α j and from α j toα j+1 .With 2D curves <strong>the</strong> definition and hence <strong>the</strong> computation of curvature isstraightforward while its extension to 3D surfaces require some concepts indifferential geometry.On a smooth surface S, we can define normal curvature as a starting point. ConsiderFigure 4.4, <strong>the</strong> point p lies on a smooth surface S, and we specify <strong>the</strong> orientation of Sat p with <strong>the</strong> unit-length normal N. We define S as a manifold embedded in R 3 . We canconstruct a plane Π p that contains p and N such that <strong>the</strong> intersection of Π p with Sforms a contour α. As before, we can arbitrarily par<strong>am</strong>eterize α(s) <strong>by</strong> arc length swhere α(0) = p and α’(0)= T. The normal curvature κ p (T) in <strong>the</strong> direction of T is thusα’’ (0) = κ p (T)N .This single κ p (T) does not specify <strong>the</strong> surface curvature of S at psince Π p is not a unique plane. If we rotate Π p around N, we form a new contour on Swith its own normal curvature. We can see that we actually have an infinite set of<strong>the</strong>se normal curvatures around p in every direction. Fortunately, herein enters <strong>the</strong>elegance of surface curvature. For this infinite set, we can construct an orthonormalbasis {T 1 , T 2 } that completely describes <strong>the</strong> set. The natural choice for this basis is <strong>the</strong>tangent vectors associated with <strong>the</strong> maximum and minimum normal curvatures at psince <strong>the</strong> directions of <strong>the</strong>se curvatures are always orthogonal.(a)(b)Figure 4.4: Illustration to understand curvature of a surface.













