Download - VEX Robotics
Download - VEX Robotics
Download - VEX Robotics
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
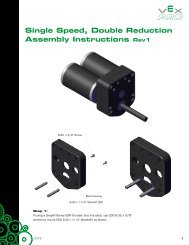
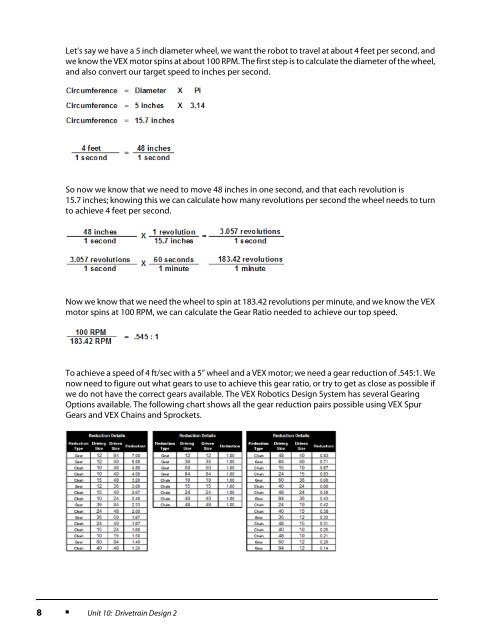
Let’s say we have a 5 inch diameter wheel, we want the robot to travel at about 4 feet per second, andwe know the <strong>VEX</strong> motor spins at about 100 RPM. The first step is to calculate the diameter of the wheel,and also convert our target speed to inches per second.So now we know that we need to move 48 inches in one second, and that each revolution is15.7 inches; knowing this we can calculate how many revolutions per second the wheel needs to turnto achieve 4 feet per second.Now we know that we need the wheel to spin at 183.42 revolutions per minute, and we know the <strong>VEX</strong>motor spins at 100 RPM, we can calculate the Gear Ratio needed to achieve our top speed.To achieve a speed of 4 ft/sec with a 5” wheel and a <strong>VEX</strong> motor; we need a gear reduction of .545:1. Wenow need to figure out what gears to use to achieve this gear ratio, or try to get as close as possible ifwe do not have the correct gears available. The <strong>VEX</strong> <strong>Robotics</strong> Design System has several GearingOptions available. The following chart shows all the gear reduction pairs possible using <strong>VEX</strong> SpurGears and <strong>VEX</strong> Chains and Sprockets.8■Unit 10: Drivetrain Design 2