
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
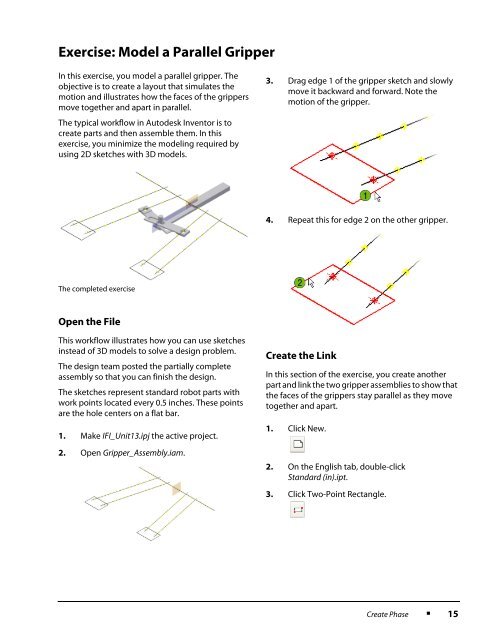
Exercise: Model a Parallel GripperIn this exercise, you model a parallel gripper. Theobjective is to create a layout that simulates themotion and illustrates how the faces of the grippersmove together and apart in parallel.The typical workflow in Autodesk Inventor is tocreate parts and then assemble them. In thisexercise, you minimize the modeling required byusing 2D sketches with 3D models.3. Drag edge 1 of the gripper sketch and slowlymove it backward and forward. Note themotion of the gripper.4. Repeat this for edge 2 on the other gripper.The completed exerciseOpen the FileThis workflow illustrates how you can use sketchesinstead of 3D models to solve a design problem.The design team posted the partially completeassembly so that you can finish the design.The sketches represent standard robot parts withwork points located every 0.5 inches. These pointsare the hole centers on a flat bar.1. Make IFI_Unit13.ipj the active project.2. Open Gripper_Assembly.iam.Create the LinkIn this section of the exercise, you create anotherpart and link the two gripper assemblies to show thatthe faces of the grippers stay parallel as they movetogether and apart.1. Click New.2. On the English tab, double-clickStandard (in).ipt.3. Click Two-Point Rectangle.Create Phase■15