
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
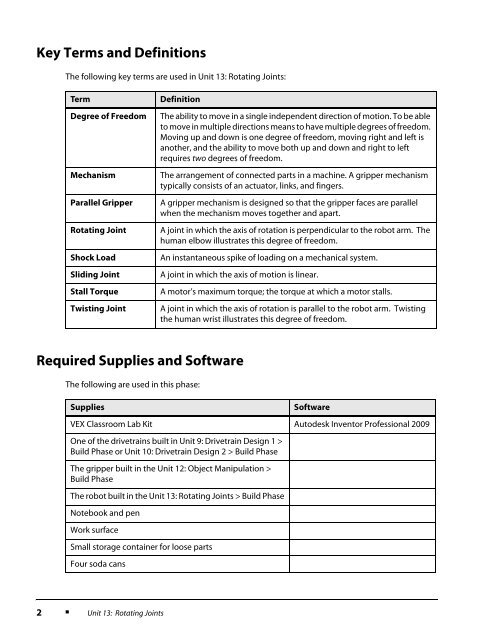
Key Terms and DefinitionsThe following key terms are used in Unit 13: <strong>Rotating</strong> <strong>Joints</strong>:TermDegree of FreedomMechanismParallel Gripper<strong>Rotating</strong> JointShock LoadSliding JointStall TorqueTwisting JointDefinitionThe ability to move in a single independent direction of motion. To be ableto move in multiple directions means to have multiple degrees of freedom.Moving up and down is one degree of freedom, moving right and left isanother, and the ability to move both up and down and right to leftrequires two degrees of freedom.The arrangement of connected parts in a machine. A gripper mechanismtypically consists of an actuator, links, and fingers.A gripper mechanism is designed so that the gripper faces are parallelwhen the mechanism moves together and apart.A joint in which the axis of rotation is perpendicular to the robot arm. Thehuman elbow illustrates this degree of freedom.An instantaneous spike of loading on a mechanical system.A joint in which the axis of motion is linear.A motor’s maximum torque; the torque at which a motor stalls.A joint in which the axis of rotation is parallel to the robot arm. Twistingthe human wrist illustrates this degree of freedom.Required Supplies and SoftwareThe following are used in this phase:SuppliesSoftware<strong>VEX</strong> Classroom Lab Kit Autodesk Inventor Professional 2009One of the drivetrains built in Unit 9: Drivetrain Design 1 >Build Phase or Unit 10: Drivetrain Design 2 > Build PhaseThe gripper built in the Unit 12: Object Manipulation >Build PhaseThe robot built in the Unit 13: <strong>Rotating</strong> <strong>Joints</strong> > Build PhaseNotebook and penWork surfaceSmall storage container for loose partsFour soda cans2■Unit 13: <strong>Rotating</strong> <strong>Joints</strong>