
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
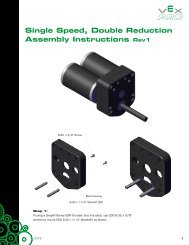
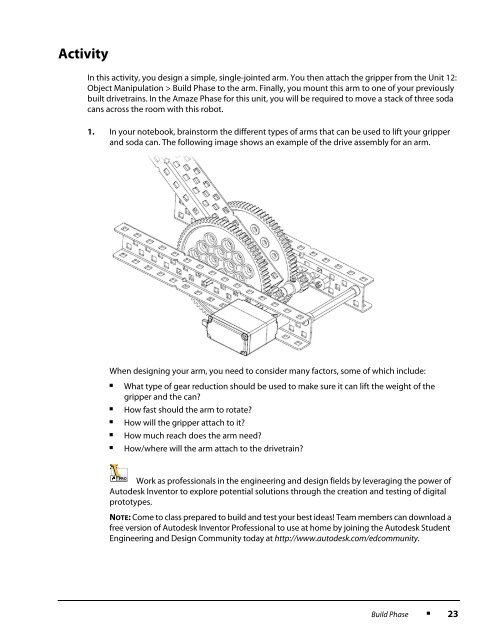
ActivityIn this activity, you design a simple, single-jointed arm. You then attach the gripper from the Unit 12:Object Manipulation > Build Phase to the arm. Finally, you mount this arm to one of your previouslybuilt drivetrains. In the Amaze Phase for this unit, you will be required to move a stack of three sodacans across the room with this robot.1. In your notebook, brainstorm the different types of arms that can be used to lift your gripperand soda can. The following image shows an example of the drive assembly for an arm.When designing your arm, you need to consider many factors, some of which include:■■■■■What type of gear reduction should be used to make sure it can lift the weight of thegripper and the can?How fast should the arm to rotate?How will the gripper attach to it?How much reach does the arm need?How/where will the arm attach to the drivetrain?Work as professionals in the engineering and design fields by leveraging the power ofAutodesk Inventor to explore potential solutions through the creation and testing of digitalprototypes.NOTE: Come to class prepared to build and test your best ideas! Team members can download afree version of Autodesk Inventor Professional to use at home by joining the Autodesk StudentEngineering and Design Community today at http://www.autodesk.com/edcommunity.Build Phase■23