

4 Final Report - Emits - ESA
4 Final Report - Emits - ESA
4 Final Report - Emits - ESA

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
4 <strong>Final</strong><br />
<strong>Report</strong><br />
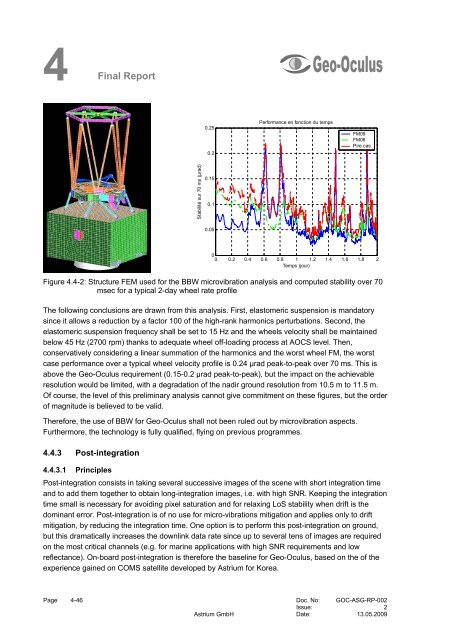
Figure 4.4-2: Structure FEM used for the BBW microvibration analysis and computed stability over 70<br />
msec for a typical 2-day wheel rate profile<br />
The following conclusions are drawn from this analysis. First, elastomeric suspension is mandatory<br />
since it allows a reduction by a factor 100 of the high-rank harmonics perturbations. Second, the<br />
elastomeric suspension frequency shall be set to 15 Hz and the wheels velocity shall be maintained<br />
below 45 Hz (2700 rpm) thanks to adequate wheel off-loading process at AOCS level. Then,<br />
conservatively considering a linear summation of the harmonics and the worst wheel FM, the worst<br />
case performance over a typical wheel velocity profile is 0.24 µrad peak-to-peak over 70 ms. This is<br />
above the Geo-Oculus requirement (0.15-0.2 µrad peak-to-peak), but the impact on the achievable<br />
resolution would be limited, with a degradation of the nadir ground resolution from 10.5 m to 11.5 m.<br />
Of course, the level of this preliminary analysis cannot give commitment on these figures, but the order<br />
of magnitude is believed to be valid.<br />
Therefore, the use of BBW for Geo-Oculus shall not been ruled out by microvibration aspects.<br />
Furthermore, the technology is fully qualified, flying on previous programmes.<br />
4.4.3 Post-integration<br />
Stabilité sur 70 ms (µrad)<br />
0.25<br />
0.2<br />
0.15<br />
0.1<br />
0.05<br />
Performance en fonction du temps<br />
FM09<br />
FM06<br />
Pire cas<br />
0<br />
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2<br />
Temps (jour)<br />
4.4.3.1 Principles<br />
Post-integration consists in taking several successive images of the scene with short integration time<br />
and to add them together to obtain long-integration images, i.e. with high SNR. Keeping the integration<br />
time small is necessary for avoiding pixel saturation and for relaxing LoS stability when drift is the<br />
dominant error. Post-integration is of no use for micro-vibrations mitigation and applies only to drift<br />
mitigation, by reducing the integration time. One option is to perform this post-integration on ground,<br />
but this dramatically increases the downlink data rate since up to several tens of images are required<br />
on the most critical channels (e.g. for marine applications with high SNR requirements and low<br />
reflectance). On-board post-integration is therefore the baseline for Geo-Oculus, based on the of the<br />
experience gained on COMS satellite developed by Astrium for Korea.<br />
Page 4-46 Doc. No: GOC-ASG-RP-002<br />
Issue: 2<br />
Astrium GmbH Date: 13.05.2009














